Ich omme noch nicht ganz klar mit dem Forum hier, daher erstmal sorry. Das ist mein fertiges und funktionierendes Lauflicht. Das Licht läuft also immer im Kreis. Soweit, so gut.
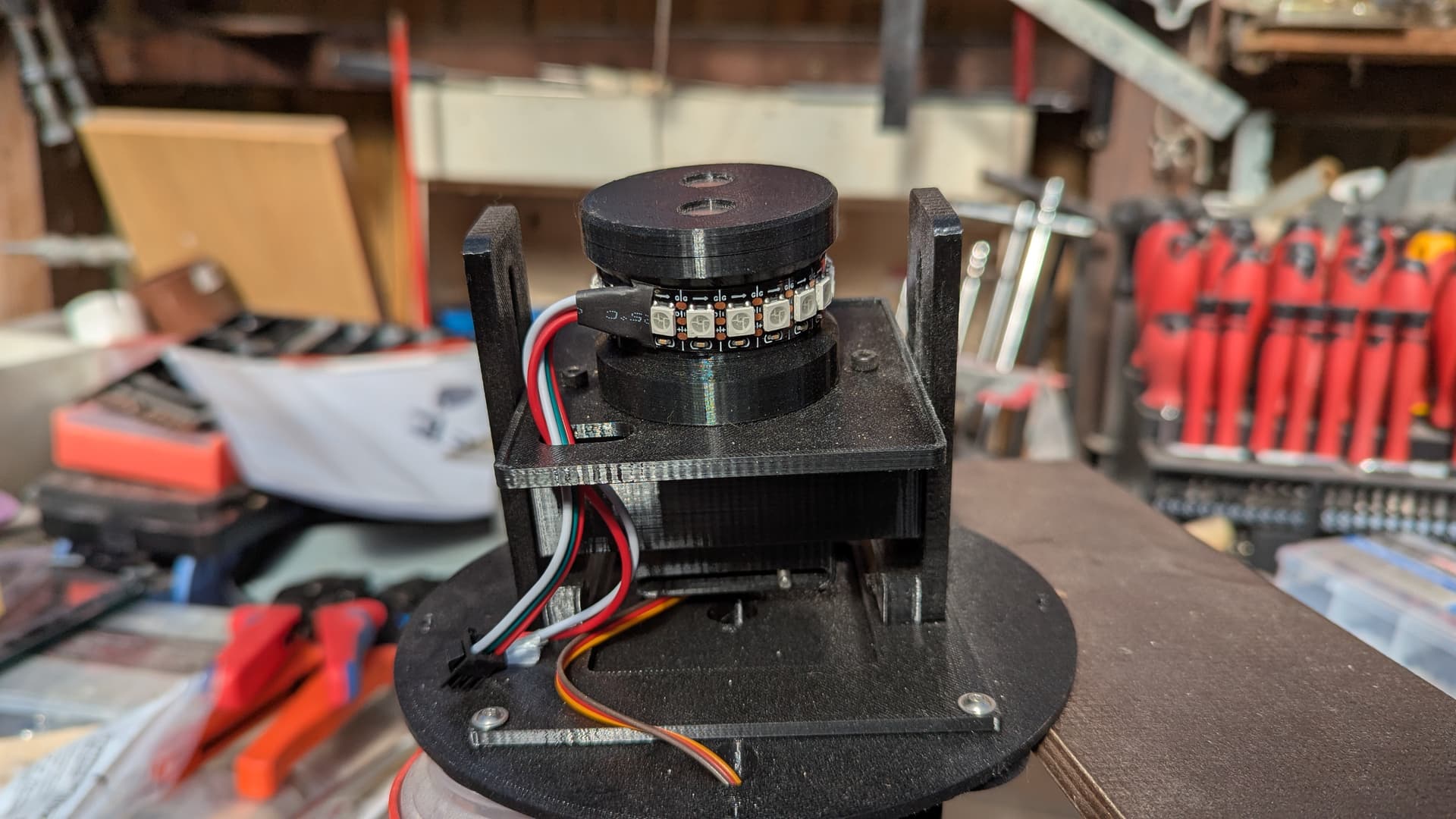
So sieht die Vorrichtung komlett aus (Ohne die rote Kappe). Die Lampe fährt wie in kleiner Fahrstuhl nach oben und runter. Mein Ziel ist, dass das Licht nur geht, wenn der Fahrstuhl oben ist. Das ist also eines meiner Ziele. Das Zweite ist, der Servo der die Lampe hoch fährt.

Ich finde irgendwie keine gute, und für mich verständliche Erklärung, wie ich den Servo erstmal auf die richtige Startposition bringe. Ich habe erstmal jetzt mit einem Tester den Servo ganz nach links gefahren und so den Arm eingesetzt. Das wäre der Ort, wo der Fahrstuhl unten ist und bleiben soll. Jetzt soll der Servo den Fahrstuhl hoch fahren. Aber, wie sag ich ihm, dass er nur bis zu einer bestimmten Stelle fahren darf? Ich möchte ja auch nicht, dass der Servo blockiert wird. Dann würde er ja unter dauerlast stehen, da er versucht weiter zu drehen, was nicht geht. Das ist mit Sicherheit nicht gut für ihn.
Als ich den R2 gebaut hatte, gab es in der zur Verfügung gestellten software die Möglichkeit die Punkte für OPEN und CLOSE zu speichern.
Z.B. der Befehl #SC011050 (#SC=Servo close , 01=Servo Nr.1, 1150=Position), Mit #SO012600 war es eben Servo OPEN. Mit dem Befehl ;MV (für move) konnte ich dann z.B. ;MV010500 den Servo 01 zu der Position 1500 fahren lassen, mit #SC speichern und gut. Aber, das System ist so ein Marcduino (was wohl wieder was anderes ist). Außer dem ist das natürlich extrem. Ich will ja nur einen einzelnen Servo irgendwie kontrollieren. Daher suche ich nun nach einer eleganten Lösung. Und anschließend natürlich dann die Sketche für den Fahrstuhl und das LED-Band zu koppeln.
So, ich hoffe ich habe das alles richtig beschrieben.