Hello all! Let me start out by saying I have zero experience with coding (great, right?). I am wondering if I am able to use one, or two arduinos for my upcoming project.
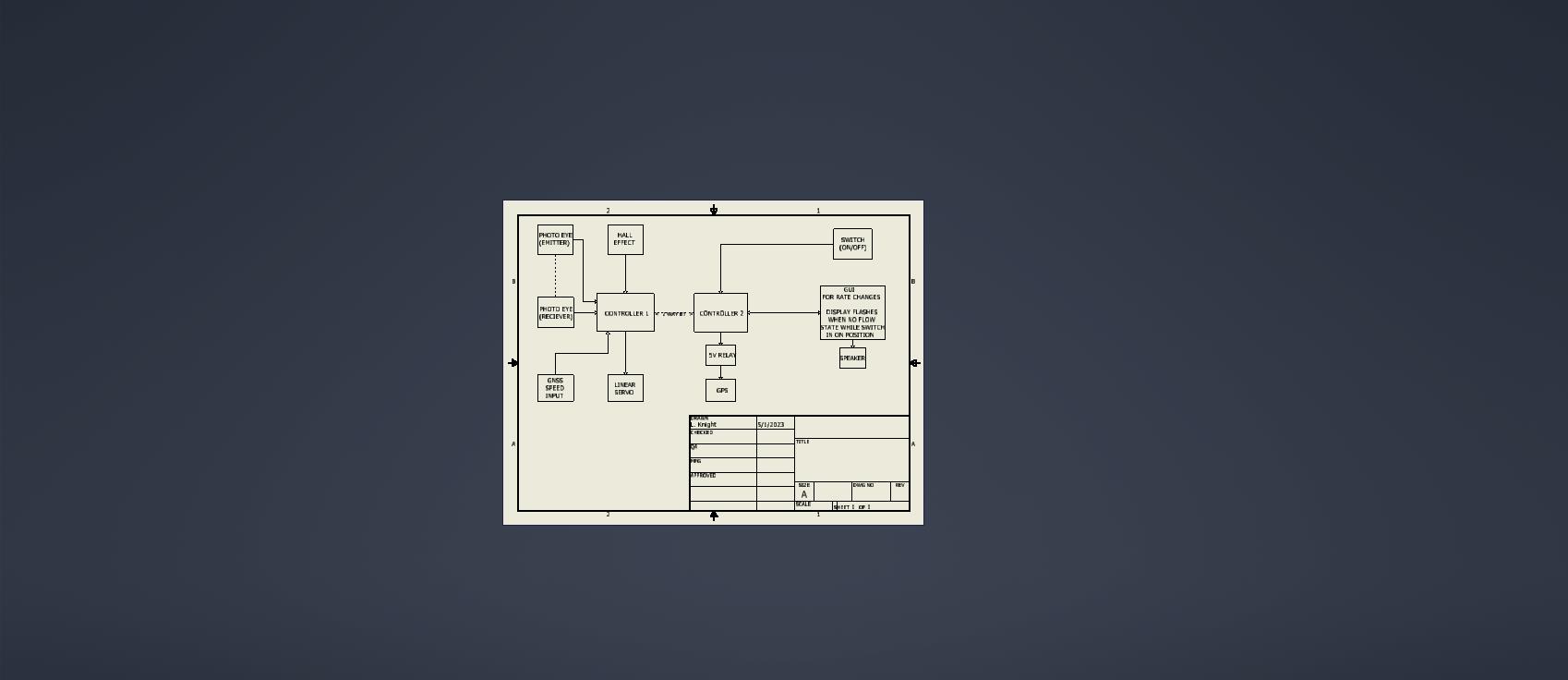
To start out, I need to control a linear servo over CLI, opened and closed by a user operated mechanical switch, with the target stroke length able to be increased and decreased by a user input of some mechanical type (increment/decrement buttons or the like).
Also, I will need to pick up two sensor inputs: a photoelectric laser eye pair, and a Hall effect sensor for RPM. The photoelectric cells will indicate product flow, and the hall sensor will indicate minimum RPM, if both of these conditions are met, while the switch for the servo is engaged, I need to activate a 5v relay.
Doing this all at one location will get me up and going for now, but eventually I would like to see the on/off switch, increment/decrement buttons, and relay operated via bluetooth from around thirty feet away, and a GNSS signal input to vary my stroke length from a target to actual ground speed (say I want a two inch stroke IF my ground speed was 65 MPH, it could increase or decrease proportionally if actual speed was 60, 72, etc.).
I would love to hear thoughts from this very knowledgeable community on this.
Thank you so much ahead of time! - Luke