That are a lot of questions, I will try to write a short answer 
I have written something about the I2C bus here: How to make a reliable I2C bus · Koepel/How-to-use-the-Arduino-Wire-library Wiki · GitHub
The LTC4311 still needs pullup resistors, because it has to detect the rising signal to be able to amplify the rising signal. It adds an extra 5mA current, which is not according to the I2C standard. It will also amplify noise.
In some special situations, the LTC4311 can be helpful. However, if your I2C bus is so bad that you need a LTC4311, then you should fix the I2C bus first, because the LTC4311 can turn a bad I2C bus into something worse.
According to the I2C standard, the maximum sink current (to pull SDA or SCL low) is 3mA.
That means you can have 9 I2C modules of 3.3V with each a 10k pullup resistor.
A single pullup of 10k should work for testing. For a real project, I prefer to put the sink current between 1mA and 3mA. The total combined pullup resistor can therefor be between 3.3kΩ and 1.1kΩ for a 3.3V I2C bus.
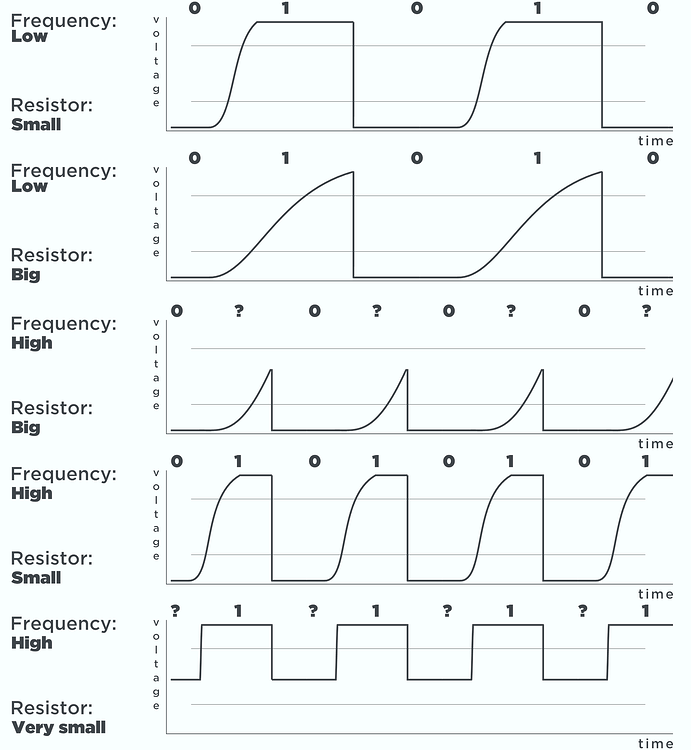
Here are some nice pictures for the rising edge: http://www.gammon.com.au/forum/?id=10896&reply=5#reply5
If you use a level shifter, then it has 10k pullup on the 5V side and 10k pullup on the 3.3V side. A I2C device has to sink all the current from both the 5V side and 3.3V side.
A I2C level shifter can be used to connect a 3.3V I2C bus to a 5V I2C bus, but a I2C level shifter also makes the I2C bus weaker.
If there are two I2C level shifters in the signal path of SDA or SCL, then the I2C bus might no longer work.
Why are many I2C devices half a meter away ?
This is the official I2C standard: https://www.nxp.com/docs/en/user-guide/UM10204.pdf
Read page 54, paragraph 7.5
They give you 10cm for the total length of the I2C bus if you do it wrong.
Suppose that you have ten I2C devices, then each has 1cm length for the I2C bus.
The good news is that if you do it right, the 50cm should be no problem.
Some manufacturers don't put 10k pullup resistors on their modules, they use whatever they have, sometimes as low as 2k2.
Can you give links to all your modules (a link to where you bought them) ? Check all the pullup resistors.
A bidirectional isolator might make things better or make things worse. Which one did you have in mind ?