Hi there, i'm working on my first project but ran into an issue.
Material in issue:
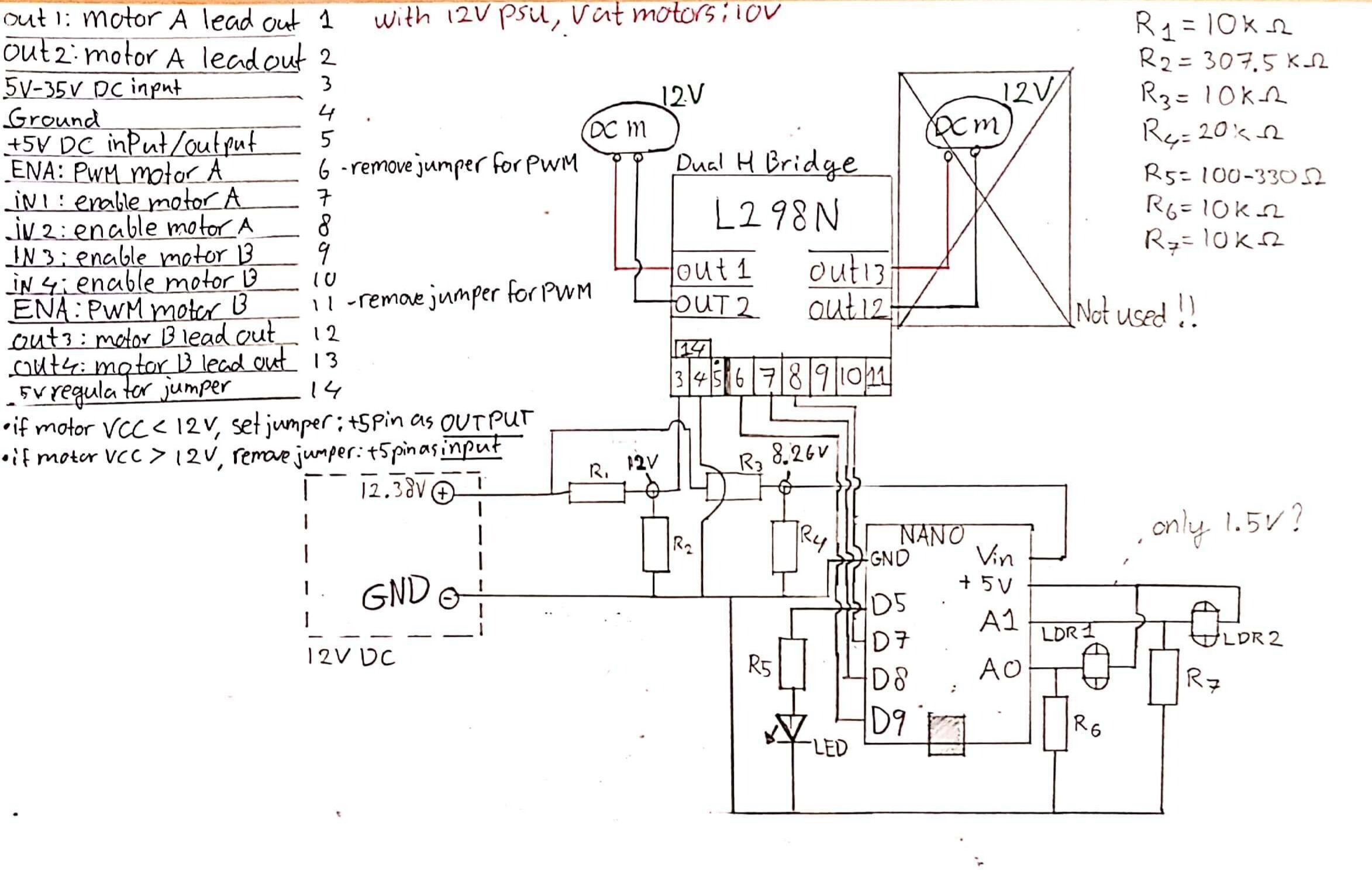
Arduino NANO
L298N dual H-bridge
my logic
when supplying 8.26V to the Vin pin of the NANO, i expected it to go through the 5V regulator and power the IC while also supplying voltage through the 5V pin. for some reason i only get 1.5V out of the 5V pin and can't wrap my head around the reason behind it.
I hope the attached images and code are enough, thank you for your time.
see code below:
//sensor connections
#define ldr_LEFT 0
#define ldr_RIGHT 1
#define led_Warning 5 //this led blinks if both ldr's are 'activated'
//motor connections (L298N)
#define enA 9
#define in1 8
#define in2 7
int fadeLeft = 5;
int fadeRight = 5;
boolean goingLeft = false;
boolean goingRight = false;
void setup() {
Serial.begin(9600);
pinMode(led_Warning, OUTPUT);
// Set all the motor control pins to outputs
pinMode(enA, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
// Turn off motors - Initial state
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
delay(1000);
}
void loop() {
directionControl(); //handles direction booleans & warning led
speedControlLeft();
speedControlRight();
}
void directionControl() {
int val_LEFT = analogRead(ldr_LEFT);
int val_RIGHT = analogRead(ldr_RIGHT);
if (val_LEFT < 500 && val_RIGHT < 500) {
goingLeft = false;
goingRight = false;
Serial.print("never tickle both armpits\n");
digitalWrite(led_Warning, HIGH);
delay(200);
digitalWrite(led_Warning, LOW);
delay(200);
digitalWrite(led_Warning, HIGH);
delay(200);
digitalWrite(led_Warning, LOW);
delay(200);
digitalWrite(led_Warning, HIGH);
delay(200);
digitalWrite(led_Warning, LOW);
delay(100);
}
if (val_LEFT < 500) {
Serial.print("LEFT LEFT LEFT\t");
goingLeft = true;
}
if (val_RIGHT < 500) {
Serial.print("RIGHT RIGHT RIGHT\n");
goingRight = true;
}
if (val_LEFT > 600) {
Serial.print("STOP LEFT\t");
goingLeft = false;
}
if (val_RIGHT > 600) {
Serial.print("STOP RIGHT\n");
goingRight = false;
}
}
void speedControlLeft() {
if (goingLeft = true) {
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
//slowly build up speed
if (fadeLeft < 255) {
if (fadeLeft >= 245) {
fadeLeft = 255;
}
else {
fadeLeft++;
}
analogWrite(enA, fadeLeft);
delay(20);
}
}
//if hand is moved away, initiate braking:
if (goingLeft = false) {
fadeLeft = 5;
// Turn off motors
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
delay(20);
}
}
void speedControlRight() {
if (goingRight = true) {
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
//slowly build up speed
if (fadeRight < 255) {
if (fadeRight >= 245) {
fadeRight = 255;
}
else {
fadeRight++;
}
analogWrite(enA, fadeRight);
delay(20);
}
}
//if hand is moved away, initiate braking:
if (goingRight = false) {
fadeRight = 5;
// Turn off motors
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
delay(20);
}
}