// Générateur signal carré simulation PMH et allumage
#define ALL 10 // Simulation Allumage cylindre Avant
#define PMHAvant 12 // Simulation Point Mort Haut cylindre Avant
#define pot_avance A0
void setup() {
pinMode(ALL, OUTPUT); // D10 SORTIE
pinMode(PMHAvant, OUTPUT); // D12 SORTIE
}
void loop() {
digitalWrite(ALL, HIGH); // On met la sortie allumage D10 à 5V
digitalWrite(PMHAvant, LOW); // On met la sortie PMH Avant D12 à l'état 0
// digitalWrite(ALL, LOW); // On met la sortie allumage D10 à 5V inversion
// digitalWrite(PMHAvant, HIGH); // On met la sortie PMH Avant D12 à l'état 0 inversion
digitalWrite(ALL, LOW); // On met la sortie allumage D10 à 0 début charge bobine
// digitalWrite(ALL, HIGH); // On met la sortie allumage D10 à 0 début charge bobine inversion
delayMicroseconds(50); // temps de charge bobine allumage environ 2 ms
digitalWrite(ALL, HIGH); // On met la sortie allumage D10 à 5V moment de l'allumage, coupure alim bobine
// digitalWrite(ALL, LOW); // On met la sortie allumage D10 à 5V moment de l'allumage, coupure alim bobine inversion
//delayMicroseconds(100);
// delayMicroseconds(map(analogRead(pot_avance),0,1023,0,1000)); // le PMH arrive peu de temps après
digitalWrite(PMHAvant, HIGH); // On met la sortie du PMH Avant D12 à 5V
// digitalWrite(PMHAvant, LOW); // On met la sortie du PMH Avant D12 à 5V inversion
delayMicroseconds(2000); // le PMH dure peu de temps à l'état 1
digitalWrite(PMHAvant, LOW); // On met la sortie PMH Avant D12 à l'état 0
// digitalWrite(PMHAvant, HIGH); // On met la sortie PMH Avant D12 à l'état 0 inversion
delay(5); // temps du cycle bobine pas alimentée
}
prog de saisie du temps entre les deux flancs montants
Merci.
Oui ça fonctionne je l'avais essayé, un peu différent
(les parties mis en commentaires // && (temps_tour)) { )
ça ne pose pas de problème, c'est une fois intégré au reste du programme que ça ne va plus malheureusement.
unsigned long deb_allumage = 0;
unsigned long deb_pmh = 0;
unsigned long tps_par_tour = 0;
boolean debut_allumage = false;
boolean debut_pmh = false;
boolean temps_tour = false;
const int UMOT = 6; // Numéro du pin U tension 0 à 5V pour simuler N régime moteur PWM
unsigned int Umot = 0; // Tension régime moteur de 0 à 5 V
const unsigned int Attente = 100; // Pour essai rapide le temps d'attente est limité entre mesures
void isr_debut_allumage()
{
if ((!debut_allumage) && (!debut_pmh)) {
deb_allumage = micros();
debut_allumage = true;
}
}
void isr_debut_pmh()
{
if ((debut_allumage) && (!debut_pmh)) {
deb_pmh = micros();
debut_pmh = true;
} else {
if ((debut_pmh) && (!temps_tour)) {
tps_par_tour = micros();
temps_tour = true;
}
}
}
void setup() {
Serial.begin(115200);
attachInterrupt(0, isr_debut_allumage, RISING);
attachInterrupt(1, isr_debut_pmh, RISING);
pinMode(UMOT, OUTPUT); // Sortie D6 PWM U tension 0 à 5V pour simuler N régime moteur
}
void loop() {
// Umot = 50; // Essai régime intermédiare
// Umot = 100; // Essai régime intermédiare
// Umot = 200; // Essai régime intermédiare
Umot = 250; // Essai régime maxi
analogWrite(UMOT,Umot); // Envoi du signal PWM en sortie
delay(Attente); // Attendre avant de mesurer la prochaine série
if ((debut_allumage) && (debut_pmh) && (temps_tour)) {
cli();
Serial.print (720 / ((tps_par_tour - deb_pmh) / (deb_pmh - deb_allumage))); // temps par tour = 2 tours moteur
Serial.print(",");
Serial.println();
Serial.print("DATA,");
debut_allumage = false; debut_pmh = false; temps_tour = false;
sei(); delay(Attente);
}
}
hello moto_michel_m_V2.zip (8,9 Ko)
dans la version 1, je n'avais pas mis les attachInterrupt dans le setup
cette version V2 réagit sur les flancs montants.
si tu veux que ce soit sur un flanc descendant, il faudra changer le "RISING" par "FALLING" dans les attachInterrupt qui sont dans le setup
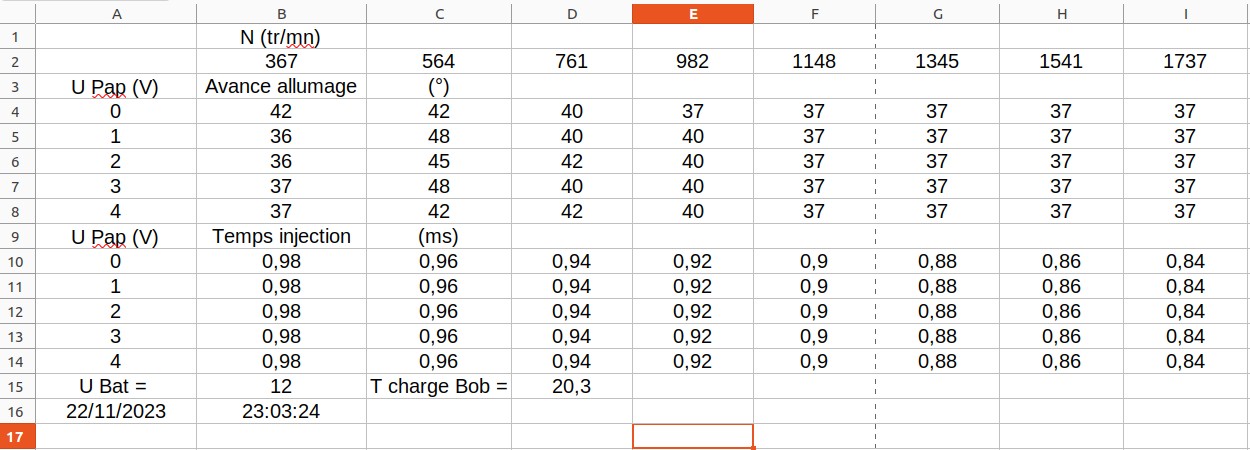
Après avoir mis mes paramètres et adapter les serialPrint pour envoi dans le tableau j'obtiens des valeurs dans quelques colonnes, sinon des 0 dans les autres.
Le code de la mesure de l'avance seule donne toujours 36 à 37°, conforme à la réalité.
J'essaye de "bricoler" un peu, en comparant avec le code qui fait les bonnes mesures
et j'arrive à trouver le bon angle mais pas au début, c'est un peu instable
void CalculAvanceAllumage() { // Calcul avance à l'allumage
for (AvAllumage = 0, k = 0; k < NbBoucle ; k++) // boucle de mesures
{ isr = true;
delay(Attente); // Attendre avant de mesurer la prochaine série
if ((debut_allumage) && (debut_pmh) && (temps_tour)) {
isr = false;
cli();
Serial.print (720 / ((tps_par_tour - deb_pmh) / (deb_pmh - deb_allumage))); // temps par tour = 2 tours moteur
Serial.print(",");
// Serial.println();
// Serial.print("DATA,");
debut_allumage = false; debut_pmh = false; temps_tour = false;
sei();
delay(Attente);
angle_ALL += (720 / (((tps_par_tour - deb_pmh) / (deb_pmh - deb_allumage))*2));
}
}
angle_ALL = (angle_ALL / NbBoucle); // ici c'est la moyenne des mesures successives
// Serial.print(F("angle = "));
// Serial.print(angle_ALL, 2);
// Serial.print(","); // case suivante
// Serial.print(F(" °"));
angle_ALL= 0;
/*
Serial.print(F("tps_par_tour = "));
Serial.print(tps_par_tour);
Serial.print(F(" "));
Serial.print(F("avance = "));
Serial.print(AvanceAllumage); // Envoyer l'angle d'avance à l'allumage
Serial.print(F(" "));
Serial.print(F("angle = "));
Serial.print(angle_ALL, 2);
Serial.print(F(" °"));
Serial.println(","); // case suivante
*/
hello
dans les fonctons isr, j'ai fait afficher 1 , 2, 3 pour voir si tu passes dans les isr.
il faudra supprimer ces lignes car elles font perdre du temps
pour ne pas dérouler tout le prg, j'ai commenté des lignes d'appels de fonctions dans la loop
Bonjour dfgh,
C'est de mieux en mieux, je suis rassuré c'est possible !
Alors effectivement j'ai vu les 123 à chaque pas de U Pap, ensuite j'ai commenté ces lignes, et j'avais la moitié de la valeur attendue, j'ai simplement enlevé le *2 qui n'y était pas avant dans le serialPrint,
et là j'ai bien 36 à 37°, sauf la première colonne du régime N le plus bas, mais après c'est bon jusqu'au régime maxi.
Super !
void UPapillonGazAvAll() { // Simuler la tension du potentiomètre des gaz par pas pour cacul avance allumage ***** Vérifié : Bon ******
while (Upap < UpapMaxi) { // Tant que la tension maxi papillon des gaz n'est pas atteinte
analogWrite(UPAP, Upap); // Envoi du signal PWM en sortie
delay(Attente); // Attendre avant de mesurer la prochaine série
Serial.println(); // ligne suivante utile ici pour envoi openoffice calc sinon pas d'envoi
Serial.print("DATA,"); // utile ici sinon pas d'envoi vers le tableau openoffice calc
// Serial.println();
// Serial.print("U Pap = "); // pour essai envoi du texte
Serial.print(float (Upap) / 51); // Envoyer U papillon / 51 pour avoir en V
// Serial.println();
InitVarUregimeMoteur(); // intialiser les variables U et N régime moteur pour recommencer un cycle de mesures
delay(Attente); // Attendre avant de mesurer la prochaine série
UregimeMoteurAvAll(); // U pour simuler régime moteur
Upap += DuPap; // Augmenter U papillon da la valeur du pas déterminée par DUPAP
if (Upap >= UpapMaxi) { // Si Upap dépasse le maxi alors il doit être au maxi
Upap = UpapMaxi;
}
}
}
void UregimeMoteurAvAll() { // Simuler la tension, qui va créer le régime moteur, par pas pour calcul avance allumage
Serial.print(","); // envoi à la case suivante openoffice calc à la place de ligne suivante
Umot = UmotMini;
while (Umot < UmotMaxi) { // Tant que la tension maxi régime moteur n'est pas atteinte :
analogWrite(UMOT, Umot); // Envoi du signal PWM en sortie
delay(Attente); // Attendre avant de mesurer la prochaine série
// Serial.print(Umot); // Seulement pour essai Envoyer U papillon openoffice calc
// Serial.print(","); // Seulement pour essai envoi à la case suivante sur la ligne openoffice calc
CalculAvanceAllumage(); // après simulation du régime moteur mesurer les avances à l'allumage
Umot += DuMot; // Augmenter U régime moteur de la valeur du pas déterminée par DuMot
if (Umot >= UmotMaxi) { // Si Umot dépasse le maxi alors il doit être au maxi
Umot = UmotMaxi;
}
}
}
void CalculAvanceAllumage() { // Calcul avance à l'allumage
sei();
// for (AvAllumage = 0, k = 0; k < NbBoucle ; k++) // boucle de mesures
k=0;debut_allumage = false; debut_pmh = false; temps_tour = false;
while (k<NbBoucle)
{ isr = true;
delay(Attente); // Attendre avant de mesurer la prochaine série
if ((debut_allumage) && (debut_pmh) && (temps_tour)) {
isr = false;k++;
debut_allumage = false; debut_pmh = false; temps_tour = false;
delay(Attente);
// angle_ALL += (720 / (((tps_par_tour - deb_pmh) / (deb_pmh - deb_allumage))*2));
angle_ALL += (720 / (((tps_par_tour - deb_pmh) / (deb_pmh - deb_allumage))));
}
}
angle_ALL = (angle_ALL / NbBoucle); // ici c'est la moyenne des mesures successives
// Serial.print(F("angle = "));
Serial.print(angle_ALL, 2);
Serial.print(","); // case suivante
// Serial.print(F(" °"));
angle_ALL= 0;
/*
Serial.print(F("tps_par_tour = "));
Serial.print(tps_par_tour);
Serial.print(F(" "));
Serial.print(F("avance = "));
Serial.print(AvanceAllumage); // Envoyer l'angle d'avance à l'allumage
Serial.print(F(" "));
Serial.print(F("angle = "));
Serial.print(angle_ALL, 2);
Serial.print(F(" °"));
Serial.println(","); // case suivante
*/
delay(Attente); // Attendre avant de mesurer la prochaine série
}
void isr_debut_allumage()
{
if (isr) { //1 si flanc montant sur début allumage
if ((!debut_allumage) && (!debut_pmh)&&(!temps_tour)) {
deb_allumage = micros();
//deb_allumage= 400000;
debut_allumage = true;
// Serial.print("1");
}
}
}
void isr_debut_pmh()
{ if (isr) {// 2 si flanc montant sur debut pmh
if ((debut_allumage) && (!debut_pmh)&&(!temps_tour)) {
deb_pmh = micros();
//deb_pmh =500000;
debut_pmh = true;
// Serial.print("2");
} else {// 3 si flanc montant sur fin pmh soit un tour complet
if ((debut_pmh) && (!temps_tour)) {
tps_par_tour = micros();
//tps_par_tour = 1000000;
temps_tour = true;
// Serial.println("3");
}
}
}
}
Tableau des résultats
Donc juste la première colonne pour N = 367 tr/mn, peut-être augmenter le délai "attente" qui est court pour les essais, ou commencer N plus bas à 0 et ne pas tenir compte de cette colonne