Ok, so some backstory (You can skip to paragraph 4). I’ve been wanting to build a spherical robot for some time now, the problem of these robots is there price. From the Omni wheels to the 4 motors to the materials. It was simply too much for a 16yr old.
I also never really liked the idea of a hamster drive, it was unreliable and didn’t have the torque needed for navigating rough tertian. Id much rather have something directly connected to the sphere like a pendulum but didn’t like the fact that they couldn’t move like and omnidirectional hamster drive could. I was told by my peers that I wanted something that simply could not exist. But you cant stop innovation.
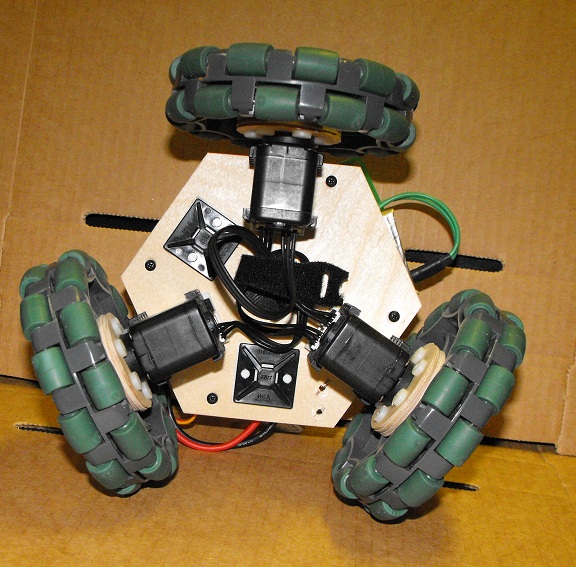
I believe that my design overcomes the issues and takes the best from both. This design is basically a heavy weight near the ground surrounded by a spherical gimbal which is plated with a vacuum formed PVC sphere.
So what’s the catch. Well the catch is that it requires an advanced function to calculate the needed ratio of steps by each motor (stepper motor that is) to move in any given direction based on the moving position of the second motor calculated by a rotary encoder on the first motor. It’s a mouthful, I know. But because the second motor is placed on the ring being rotated by the first, I need to change speeds depending on the direction desired to be traveled and the position of motor 2.
The equation will be used in conjunction with a compass which will first determine what direction it wants to go.
So lets say
The compass position is represented by a
The desired direction is represented by b
And the angel of the second motor motor is represented by c
I need to use this to find a ratio between the number of identical steps to be taken by each motor
(motor 1 (x), motor 2 (y))
I then need to use another equation or even the same equation to find how fast the motors need to travel to go at a one unit of speed so that I can keep the speeds constant and easily change speed. All this, I believe, can be calculated by an Arduino Nano if the equation is simplified enough.
I don’t even know where to start.