I'm trying to create a miniature version (less balls) of this just because it looks cool:
It looks like they attach string to a ball and then this gets moved up or down on the y axis. Together they create a 3d object.
I thought about stepper motor to move the balls up and down accurately but they are expensive especially as i would need loads so thats out of the question!!
I then thought of modding some mini servos to have 360 rotation but can't work out if i will be able to still maintain accuracy needed to postion the ball correctly?
Then i thought about standard dc motors with a gearing system and B&W sensors so that as the motor turns it can detect repeating blocks of white and black to detect where it is but thats a little to complicated!
Anyway i was wondering if anyone had any ideas on the accuracy of modded servos? can i still position it accurately? Or does this sound like a stepper motor job?
If you got enough mechanical leverage, you could probably do that with 180 degree servos. You just need to make sure that the movement from 0 to 180 gives you enough height, using a large arm or wheel or whatever is driving the string.
Also, there exists inexpensive small stepper motors. But I imagine the problem is the driving thereof? As long as the current draw is low, you can use very inexpensive transistors for an H-bridge, but you still have to control it somehow. Times a thousand or however many balls you want to control...
Hmm. Even at $10 per completed ball assembly, a thousand balls is $10,000...
Hi, first sorry for my english but it isn't my mother language. Me too am working on the same project, iv'e found on ebay a cheap stepper motor with an uln2003 drive board, two stepper and two driver board cost around 6 euro, and it can easily move a little ball or something similar, if you wont more details contact me in a private message for the links. for now i'm tryng with four motor drived by an arduino mega board, that support up to 12 motor in theory, and i've done some things like a wave, working all the stepper at the same time, if you wont more information reply this or contact me, bye. Riccardo
Hi, I add news on the project, done! I've made it with an array of 16 motors, 4X4, that is the least that a mega can drive with this tipe of motors, with other type I can drive 35 motors with only one mega board, but those cost 10 times more the first one, so I wait to see if someone is interested about and build it for him with my work free and the pieces payed by him, maby a buisness man that need some artistic works for his house-study-shop. Thanks at all that help me in the building!
what kind of motor and driver were talking about ? And if you want to hook up like 50 motors do sync arduino boards ? or do you use kind of addressable solution ?
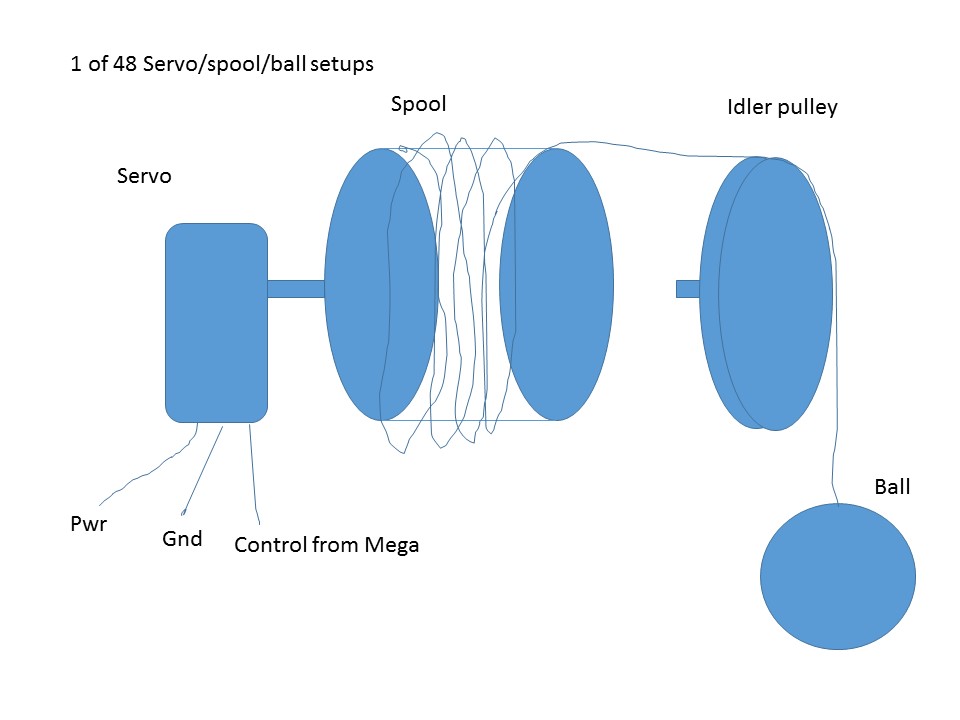
Mega can do 48 Servos
I think other motors will need at least 2 pins for up & down, so now you're looking at syncing multiple cards.
I'd try continuous rotation servos. Probably need to 'calibrate' them: maybe at first turn on you send serial command to raise each one by one to a known position, then each will have a spool of fishing line/string, and you know how many turns of the spool you command how far the end of the string will move.
Automate that even, use 3 16:1 muxes (ex. DG406) to read limit switches for calibration. 3 inputs, 4 channel selects, 48 servos, 2 lines for serial, 59 pins used, still have 11 free for other stuff.
What do you mean with "Automate that even, use 3 16:1 muxes (ex. DG406) to read limit switches for calibration. 3 inputs, 4 channel selects,"
i was thinking of using an ultrasone for calibrating strings ( pull up weight.....when weight distance is shorter than 10 cm ...calibrate). Any good shops for buying these servo's ?
So a setup like this (can't really show the 3D-ness of it, but I think it gets the idea across).
Try a couple of servo, see what's needed to lift 500g (~1 pound).
You might be surprised and find a Standard Servo is all you need, and the biggest part of the problem is securing the other end of the spool so it doesn't get twisted around by the weight of the ball.
DG406 - http://www.digikey.com/product-detail/en/intersil/DG406DJZ/DG406DJZ-ND/821393
This is a 16 input, 1 output analog switch. Wire each input to the ball position sensor, select which input you will read and move that ball until the input changes. You need 4 address lines to select the input, all 4 address lines can go to all 3 DG406s, each will have 1 output that would go to a unique input pin on the Mega.
Just basic math: circumference = 2 x Pi x Radius, or Pi x Diameter, circumference/Pi = diameter
Pi = 3.1415926535 (press the button on the calculator)
1 foot of travel per rotation = 12"/Pi = 3.8" diameter spool
Pricey. 6 or 8 or 16 boards will add up.
For the price of a couple of those you could just get a 2nd Mega and do 96 servos.
Or find a less expensive source.
Does provide a convenient way to plug 8 servos in tho.
It looks like they attach string to a ball and then this gets moved up or down on the y axis. Together they create a 3d object.
I thought about stepper motor to move the balls up and down accurately but they are expensive especially as i would need loads so thats out of the question!!
I then thought of modding some mini servos to have 360 rotation but can't work out if i will be able to still maintain accuracy needed to postion the ball correctly?
There is no accuracy of any kind if you just use a motor (a continuous rotation servo is not a servo, its
a motor + driver). You would need to sense position or angle somehow.
Then i thought about standard dc motors with a gearing system and B&W sensors so that as the motor turns it can detect repeating blocks of white and black to detect where it is but thats a little to complicated!
A DC gearmotor with an encoder would work. Cost is the issue.
What about just using a hobby servo with a long actuator arm and a very light ball on the string?
Anyway i was wondering if anyone had any ideas on the accuracy of modded servos? can i still position it accurately? Or does this sound like a stepper motor job?
I suspect you could use the potentiometer of a modded servo to keep track of position and turn count
in some rather hacked together way as a crude encoder - probably with a gap on every rotation for a bit!
So Cross and all, I managed to do some tests with the Adafruit 16 ch servo board. Playing around with the functions etc. now in order to calibrate for instance 64 servo's i need 64 sensors to track each ball's movement. Mainly when they all go upwards to calibrate. Now 64 Ultrasones is an option but i think using a IR Infrared sensor that lets the servo stop when he sees the black ball or an other black piece. cheaper and more simple
Would this be a better solution ? and what multiple sensor board could you recomend ?