Ciao A tutti ho appena concluso un progetto che permette di scrivere leggere e inviare/ricevere file da UART, in una memoria flash SPI-NOR.
L'interfaccia si presenta come un menù con varie opzione, per selzionare l`opzione è necessario inviare un numero seguito da invio... successivamente si avvierà il sotto menu.
È possibile leggere lo stato della memoria, cancellarla leggere il device id molto altro.
Le momorie compatibili sono quelle della famiglia 25x, qui sotto ho elencato anche gli OPCODE che utilizzo in modo da poter fare un rapido controllo con il datasheet per la compatibilità.
A più di metà lavoro ho trovato la libreria https://docs.arduino.cc/libraries/spi-flashmem/ ma non faceva a caso mio :( ma la consiglio.
Sono ancora in fase di sviluppo quindi se avete idee possiamo implementarle.
PS:Ho testato velocità di SPI fino a 20MHz senza errori ma preferisco lavorare a 2MHz
Arduino-UART-SPI-NOR-testbench
Un firmware per Arduino per leggere, scrivere, cancellare e trasferire file su SPI NOR Flash tramite UART.
Caratteristiche
-
Controllo della Memoria Flash SPI NOR
- Supporta solo 1x SPI
- Cancella blocchi specifici (4KB, 32KB, 64KB)
- Scrive e legge singoli byte o pagine
- Cancella chip (cancellazione completa della memoria)
- Legge ID dispositivo e registri di stato
- Impostazioni SPI configurabili
- Massima dimensione FLASH 2.097.152byte o 16.777.216bits. Perchè l`address è 24bit
- Compatibile con la serie 25 di SPI NOR Flash (ad es. Winbond, Macronix, SST, Microchip)
ELENCO OPERATION CODES
-
Integrità e Trasferimenti dei Dati
- Calcolo CRC32 per verificare l'integrità della memoria
- Scarica la Memoria Flash su UART (per registrazioni o backup)
- Transazioni SPI personalizzate (ad esempio codice operativo personalizzato)
- Riceve file tramite XMODEM e li memorizza in SPI NOR Flash
- Invia file tramite XMODEM da Flash a UART
-
Controllo Hardware
- Supporto per reset software e hardware
Configurazione Hardware
Schede Supportate
- Arduino Minima R4
- Qualsiasi convertitore di livello bidirezionale 3v3 a 5V
- SPI-NOR Flash serie 25
- Testato MX25L128356(Datasheet SPI-NOR)
Connessioni
| Segnale SPI | Pin Arduino Minima R4 |
|---|---|
| MISO (CIPO) | D11 |
| MOSI (COPI) | D12 |
| SCK | D13 |
| CS (Chip Select) | D10 |
| RST (Reset Opzionale) | D9 |
Comandi Supportati
Controlla nel datasheet del tuo SPI-NOR se sono compatibili con i codici operativi dell'elenco sottostante
| Comando | Descrizione | Codice Operativo |
|---|---|---|
1 |
Cancellazione Blocco (4KB, 32KB, 64KB) | 20h / 52h / D8h |
2 |
writeEnable | 06h WREN |
3 |
chipErase | C7h |
4 |
readFlash | 03h RDSR |
5 |
statusRegister | 05h RDSR |
6 |
writeData | 02h PP |
7 |
deviceID | 90h REMS |
8 |
deviceID | 9Fh RDID |
9 |
Legge dati da UART e li scrive su flash | 02h |
10 |
calc CRC32 | 03h |
11 |
ciclo di Reset Hardware | - |
12 |
Scarica Flash su UART | 03h |
13 |
Impostazione SPI | - |
14 |
Transazione SPI Personalizzata | - |
15 |
Riceve file XMODEM e scrive su flash | 02h |
16 |
Invia file XMODEM | 3h |
Configurazione della Comunicazione Seriale & Trasferimento File
Non Usare Arduino Serial Monitor per il Trasferimento dei File
Arduino Serial Monitor non supporta i trasferimenti di file, quindi non deve essere utilizzato per inviare o ricevere dati.
Per i trasferimenti di file, utilizzare Tera Term o un altro emulatore di terminale che supporti il protocollo XMODEM, oppure inviare file binari di dimensioni 256 byte.
Configurazione Tera Term per il Trasferimento dei File
-
Apri Tera Term.
-
Vai a Setup > Terminal:
- Receive: AUTO
- Transmit: CR (Carriage Return)
-
Vai a Setup > Serial Port:
- Velocità:
115200baud - Bit di Dati:
8 - Parità:
None - Bit di Stop:
1 - Controllo del Flusso:
Xon/Xoff - Ritardo di Trasmissione:
0ms
- Velocità:
 Note Importanti
Note Importanti
- Assicurati che il controllo del flusso sia abilitato (
Xon/Xoff). - Non utilizzare Arduino Serial Monitor per i trasferimenti di file. Imposta
Carriage Returne115200 - Solo per il debug, Arduino Serial Monitor può ancora essere utilizzato per visualizzare i log a
Esempio
-
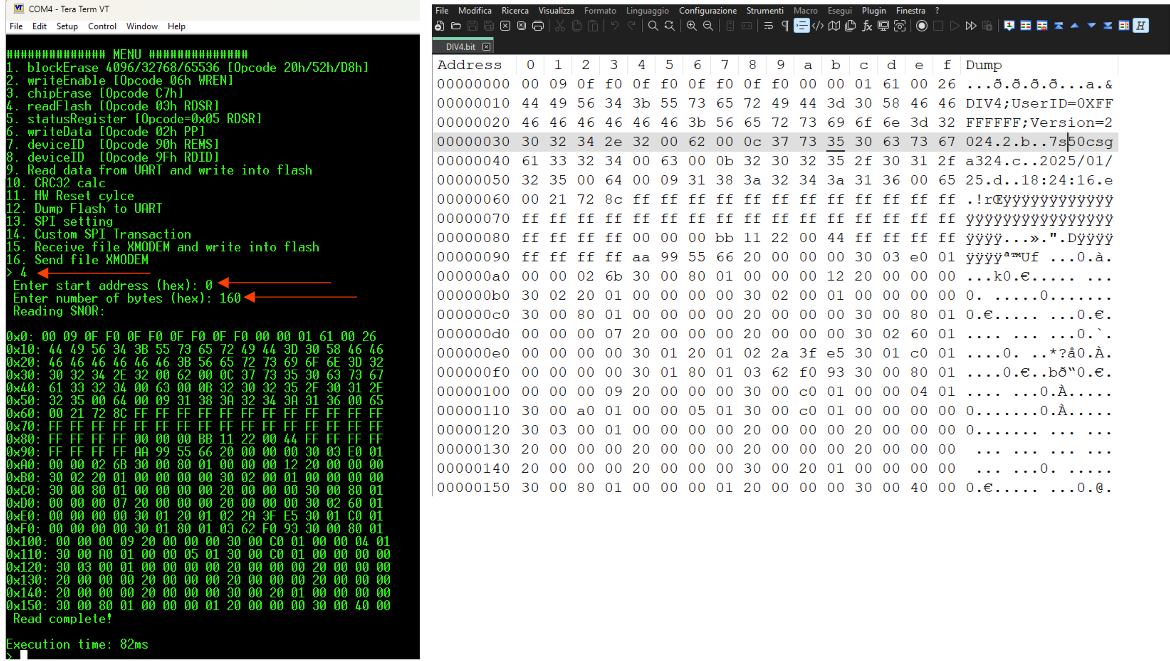
Lettura Flash ('4')
- Inserisci l'indirizzo di partenza (esadecimale).
- Inserisci il numero di byte da leggere (esadecimale).
- I dati sono visualizzati in formato esadecimale.
- Il formato di uscita è
0xADDR: DATA DATA DATA - Ogni riga contiene 16 byte. L'immagine a destra è la vista esadecimale di Notepad++
- Il formato di uscita è
-
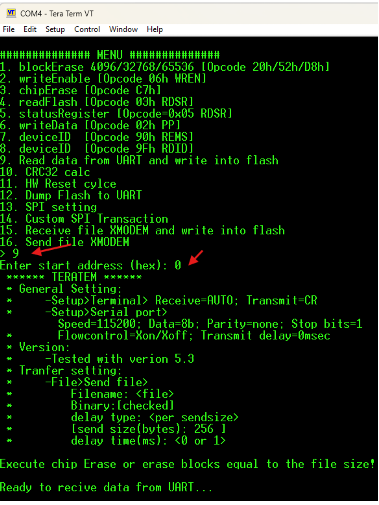
Legge dati da UART e li scrive su flash, ricordati di cancellare la flash!!! ('9')
-
Inserisci l'indirizzo di partenza dove vuoi iniziare a scrivere (esadecimale).
-
Configura Teraterm per inviare file binari per dimensione, non inviare caratteri dalla tastiera
-
Il trasferimento del file inizierà
-
Alla fine la dimensione del file deve corrispondere alla dimensione indicata.
-



- Calcolo CRC32 ('10')
-
Inserisci l'indirizzo di partenza dove vuoi iniziare a calcolare CRC32 (esadecimale).
-
Inserisci il numero di byte uguale alla dimensione del file (esadecimale), in questo esempio 2192112 byte è 2172F0
-
Confronta CRC32 file sul tuo PC usando 7zip (o simile)
-

- Ricevi file da XMODEM e scrivi dati su flash ('15')
-
Inserisci il numero di byte uguale alla dimensione del file (esadecimale), in questo esempio 2192112 byte è 2172F0
-
Inserisci l'indirizzo di partenza dove vuoi iniziare a scrivere (esadecimale).

-
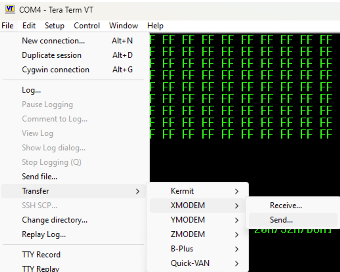
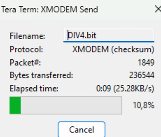
Invia file con protocollo XMODEM
-
Si aprirà automaticamente
-
Alla fine
-
Connessione Hardware


Jampag/Arduino-UART-SPI-NOR-testbench
Codice
/*
* Project: Arduino Project to Communication and Write with SPI-NOR
* Author:Jampag [https://github.com/Jampag/UART_to_SPI-NOR.git]
* Data YYYY-MM-DD: 2025-02-25
* Version : 0.1.2
* Description :
* This firmware allows communication with an SPI NOR Flash memory via UART,
* providing operations such as reading, writing, erasing, and CRC32
* calculation.
* It supports file transfer using the XMODEM protocol or send file with
* Teraterm or similar.
*
* Repository: https://github.com/Jampag/Arduino-UART-SPI-NOR-testbench
*
* Features:
* - Only support 1x SPI
* - Read/Write to SPI NOR Flash memory
* - Sector/Block erase operations
* - CRC32 calculation over a memory range
* - File transfer using XMODEM or UART
* - Configurable SPI settings
* - Dump Flash memory to UART
* - Compatible with 25-series SPI NOR Flash
* Max Flash size is 16777216bits/2,09715MByte
* (The addresses are 24 bits equal to 16777216 bits)
*
* Hardware Requirements:
* - Arduino Minima R4 microcontroller
* MISO(CIPO)=D12; MOSI(COPI)=D11; SCK=D13
* - Compatible SPI NOR Flash memory x25 family
* - Level translator bidirectional 3V3<->5V
*
*
* Setting Arduino Serial Monitor:
* Carriage Return; 115200baud; not use to UART to flash
*
* TERATERM
* General Setting:
* -Setup>Terminal> Receive=AUTO; Transmit=CR
* -Setup>Serial port> Speed=115200; Data=8b; Parity=none; Stop bits=1;
* Flowcontrol=Xon/Xoff; Transmit delay=0msec
* Version:
* -Tested with verion 5.3
* Tranfer setting:
* -File>Send file>
* Filename: <file>
* Binary:[checked]
* delay type: <per sendsize>
* send size(bytes): 256
* delay time(ms): <0 or 1>
*
* Changelog:
* 0.1.2 - Added CRC32 compute on data from UART, at option '9'
* 0.1.1 - Added print ASCII at option 4
* 0.1.0 - Initial version with XMODEM support and basic SPI NOR Flash
* functions.
* Tested with SPI-NOR MX25L128356 128Mbit (Mn.ID=C2 D.ID=17)
* attention 3V3
* Arduino Minima R4 needed voltage level translator to interconnect
* SPI-NOR.
*/
#include <SPI.h>
//#include <CRC32.h> //Thanks Christopher Baker 2.0.0
#define XON 0x11
#define XOFF 0x13
#define CS_FLASH 10 // Chip Select SPI Flash
#define RST_FLASH 9 // Reset SPI Flash
const int BUFFER_SIZE = 256; // byte
char buffer[BUFFER_SIZE];
int bufferIndex = 0;
uint32_t flashAddress = 0;
bool receiving = false;
bool inWriteLoop = false;
bool Attend_buffer = true;
unsigned long execStart = 0;
unsigned long execStop = 0;
unsigned long exec = 0;
unsigned long lastWriteTime = 0;
unsigned long totalBytesWritten = 0;
unsigned long totalBlocksWritten = 0;
uint32_t addr;
uint32_t numByte;
int blockSize, numBlocks;
uint32_t crc = ~0L; // CRC32
//SPI
uint32_t clkSPI = 2000000;
BitOrder bitOrder = MSBFIRST;
uint8_t spiMode = SPI_MODE0;
//XMODEM
#define SOH 0x01 // Start of Header (inizio blocco)
#define EOT 0x04 // End of Transmission (fine trasmissione)
#define ACK 0x06 // Acknowledge (dati ricevuti correttamente)
#define NAK 0x15 // Negative Acknowledge (errore, ritrasmetti)
#define CAN 0x18 // Cancel
#define XMODEM_BUFFER_SIZE 128 // Evita conflitti con BUFFER_SIZE
void setup() {
Serial.begin(115200);
delay(2000);
//Arduino R4 MISO(CIPO)=D12; MOSI(COPI)=D11; SCK=D13
init_default_SPI();
showMenu();
}
void loop() {
int command=0;
if (inWriteLoop) {
UART_to_SNOR();
return;
}
else{
Serial.print(" ");
String input = readSerialCommand(); // Legge il comando
if (input.length() == 0) return;
// Serial.println();
command = input.toInt(); // Converte l'input in numero
//Initialized variable:
addr=0;
numByte=0;
blockSize=0;
numBlocks=0;
bufferIndex=0;
flashAddress=0;
}
switch (command) {
case 1: { // blockErase
Serial.print(" Enter start address (hex): ");
addr = strtoul(readSerialCommand().c_str(), NULL, 16);
Serial.print(" Enter block size (4096, 32768, 65536): ");
blockSize = readIntInput();
Serial.print(" Enter number of blocks: ");
numBlocks = readIntInput();
execStart = millis();
blockErase(addr, blockSize, numBlocks);
execStop = millis();
Serial.print("\nExec. : ");Serial.print(execStop - execStart);Serial.println("ms");
Serial.print(">");
break;
}
case 2: // writeEnable
writeEnable();
Serial.print(" WREN enabled,latch/self clear ");
Serial.print(">");
break;
case 3:
execStart = millis();
chipErase();
execStop = millis();
Serial.print("\nExec. : ");Serial.print(execStop - execStart);Serial.println("ms");
Serial.print(">");
break;
case 4: {
Serial.print(" Enter start address (hex): ");
addr = strtoul(readSerialCommand().c_str(), NULL, 16);
Serial.print(" Enter number of bytes (hex): ");
numByte = strtoul(readSerialCommand().c_str(), NULL, 16);
execStart = millis();
readFlash(addr, numByte);
execStop = millis();
Serial.print("\nExecution time: ");
Serial.print(execStop - execStart);Serial.println("ms");
Serial.print(">");
break;
}
case 5: // Status register
printStatusRegister();
showMenu();
break;
case 6: { // Write data
Serial.println("Erase block before write! ");
Serial.print(" Enter start address (hex): ");
addr = strtoul(readSerialCommand().c_str(), NULL, 16);
Serial.print(" Enter data byte (hex): ");
byte data = (byte) strtoul(readSerialCommand().c_str(), NULL, 16);
writeByte(addr, data);
Serial.print(">");
break;
}
case 7:
readREMS();
Serial.print(">");
break;
case 8:
readRDID();
Serial.print(">");
break;
case 9:
crc = ~0L;
Serial.print("Enter start address (hex): ");
flashAddress = strtoul(readSerialCommand().c_str(), NULL, 16); //
inWriteLoop = true;
delay(100);
Attend_buffer = false; // Si avvia solo dopo 1 buffer 256
Serial.println(" ****** TERATEM ******");
Serial.println(" * General Setting: ");
Serial.println(" * -Setup>Terminal> Receive=AUTO; Transmit=CR");
Serial.println(" * -Setup>Serial port> ");
Serial.println(" * Speed=115200; Data=8b; Parity=none; Stop bits=1");
Serial.println(" * Flowcontrol=Xon/Xoff; Transmit delay=0msec");
Serial.println(" * Version:");
Serial.println(" * -Tested with verion 5.3");
Serial.println(" * Tranfer setting:");
Serial.println(" * -File>Send file> ");
Serial.println(" * Filename: <file>");
Serial.println(" * Binary:[checked]");
Serial.println(" * delay type: <per sendsize>");
Serial.println(" * [send size(bytes): 256 ]");
Serial.println(" * delay time(ms): <0 or 1>");
Serial.println("\nExecute chip Erase or erase blocks equal to the file size!");
Serial.println("\nMinimun file size is 256byte!");
Serial.println("\nReady to recive data from UART...");
execStart = millis();
UART_to_SNOR();
return;
case 10: {
Serial.print(" Enter start address (hex): ");
addr = strtoul(readSerialCommand().c_str(), NULL, 16);
Serial.print(" Enter number of bytes (hex): ");
numByte = strtoul(readSerialCommand().c_str(), NULL, 16);
execStart = millis();
unsigned long crc32 = calcCRC32(addr, numByte);
execStop = millis();
Serial.print(" CRC32: 0x");
Serial.println(crc32, HEX);
Serial.print("\nExec. : ");Serial.print(execStop - execStart);Serial.println("ms");
Serial.print(">");
break;
}
case 11:
hardwareRST();
Serial.print(">");
break;
case 12:
Serial.println(" ****** TERATEM ******");
Serial.println(" * General Setting: ");
Serial.println(" * -Setup>Terminal> Receive=AUTO; Transmit=CR");
Serial.println(" * -Setup>Serial port> Speed=115200; Data=8b; Parity=none; Stop bits=1;");
Serial.println(" * Flowcontrol=Xon/Xoff; Transmit delay=0msec");
Serial.println(" * Version:");
Serial.println(" * -Tested with verion 5.3");
Serial.println(" * Acquire setting:");
Serial.println(" * -File>Log...> ");
Serial.println(" * Filename: <file>");
Serial.println(" * Write mode: Append");
Serial.println(" * Binary:[checked]");
Serial.println(" *Execute this configuration then set waiting time");
Serial.println(" * 1-Start log file while LED is blinking");
Serial.println(" * 2-When the LED is ON,the acquisition is in progress");
Serial.println(" * 3-When the LED is OFF,close the log file\n");
dumpFlashToUART();
break;
case 13:
setSPI();
Serial.print(">");
break;
case 14:
execStart = millis();
customSPITransaction();
execStop = millis();
Serial.print("\nExec. : ");Serial.print(execStop - execStart);Serial.println("ms");
Serial.print("\n>");
break;
case 15:
receiveXmodem();
Serial.print(">");
break;
case 16:
sendXmodem();
Serial.print(">");
break;
default:
Serial.println(" Command not found!");
showMenu(); // Mostra di nuovo il menu
break;
}
}
// Mostra il menu
void showMenu() {
delay(100);
Serial.println(" ");
Serial.println("############## MENU ##############");
Serial.println("1. blockErase 4096/32768/65536 [Opcode 20h/52h/D8h]");
Serial.println("2. writeEnable [Opcode 06h WREN]");
Serial.println("3. chipErase [Opcode C7h]");
Serial.println("4. readFlash [Opcode 03h RDSR]");
Serial.println("5. statusRegister [Opcode=0x05 RDSR]");
Serial.println("6. writeData [Opcode 02h PP]");
Serial.println("7. deviceID [Opcode 90h REMS]");
Serial.println("8. deviceID [Opcode 9Fh RDID]");
Serial.println("9. Reads data from UART and writes it to flash");
Serial.println("10. CRC32 calc");
Serial.println("11. HW Reset cylce");
Serial.println("12. Dump Flash to UART");
Serial.println("13. SPI setting");
Serial.println("14. Custom SPI Transaction");
Serial.println("15. Receive file XMODEM and write into flash");
Serial.println("16. Send file XMODEM");
Serial.print(">");
}
String readSerialCommand() {
String command = "";
bool isFirstChar = true;
while (true) {
if (Serial.available()) {
char c = Serial.read();
if (c == '\n' || c == '\r') { // Rileva ENTER (CR o LF)
if (isFirstChar){
command = "0";
break;
}
if (command.length() > 0) break; // Solo se c'è almeno un carattere
} else {
Serial.print(c); // Echo sulla console
command += c;
isFirstChar = false;
}
}
}
Serial.println(); // Nuova riga dopo l'input
return command;
}
int readIntInput() {
String input = readSerialCommand();
return input.toInt();
}
void UART_to_SNOR(){
//Minimun size is 256byte
if (Serial.available()) {
if (!receiving) {
Serial.write(XOFF);
Serial.println("Writing to SPI NOR started...");
receiving = true;
}
while (Serial.available() && bufferIndex < BUFFER_SIZE) {
buffer[bufferIndex++] = Serial.read();
}
// Se il buffer è pieno, esegui la scrittura su SPI NOR
if (bufferIndex == BUFFER_SIZE) {
Serial.write(XOFF);
writeEnable(); // Abilita la scrittura sulla memoria flash
writePage(flashAddress, buffer, BUFFER_SIZE); // Scrive i dati
waitForWriteCompletion(); // Aspetta che la scrittura sia completata
flashAddress += BUFFER_SIZE; // Aggiorna l'indirizzo
totalBytesWritten += BUFFER_SIZE;
totalBlocksWritten++;
// Calcola CRC32 per i dati nel buffer
for (int i = 0; i < BUFFER_SIZE; i++) {
uint8_t data = buffer[i];
// Aggiornamento CRC con il nuovo byte letto
crc ^= data;
for (uint8_t j = 0; j < 8; j++) {
crc = (crc >> 1) ^ (0xEDB88320 & -(crc & 1));
}
}
Serial.print("Write ");
Serial.print(BUFFER_SIZE);
Serial.print(" bytes - Block #");
Serial.println(totalBlocksWritten);
bufferIndex = 0;
Attend_buffer = true ;
lastWriteTime = millis(); // Memorizza il tempo dell'ultima scrittura
Serial.write(XON); // Riabilita l'invio dei dati dalla seriale
}
}
// Se la scrittura è in corso e ci sono ancora dati nel buffer
if (receiving && Serial.available() == 0 && bufferIndex > 0 && Attend_buffer) {
unsigned long currentTime = millis(); // Ottieni il tempo corrente
// Se è passato un tempo sufficiente dall'ultima scrittura
if (currentTime - lastWriteTime >= 1000) {
Serial.print("Writing last byte buffer: ");
Serial.println(bufferIndex);
writeEnable();
writePage(flashAddress, buffer, bufferIndex); // Scrivi l'ultimo buffer
waitForWriteCompletion(); // Attendi la fine della scrittura
// Calcola CRC32 per i dati nel buffer
for (int i = 0; i < bufferIndex; i++) {
uint8_t data = buffer[i];
// Aggiornamento CRC con il nuovo byte letto
crc ^= data;
for (uint8_t j = 0; j < 8; j++) {
crc = (crc >> 1) ^ (0xEDB88320 & -(crc & 1));
}
}
totalBytesWritten += bufferIndex;
totalBlocksWritten++;
Serial.print("Last buffer size");
Serial.print(bufferIndex);
Serial.println(" byte!");
bufferIndex = 0; // Reset del buffer
Serial.println("File saved into SPI NOR!");
Serial.print("Total blocks written: ");
Serial.println(totalBlocksWritten);
Serial.print("Total bytes written: ");
Serial.println(totalBytesWritten);
Serial.print("CRC32: ");
Serial.println(~crc, HEX);
receiving = false; // Fine della ricezione dei dati
inWriteLoop = false; // Esci dal ciclo di scrittura
execStop = millis();
Serial.print("\nExec. : ");Serial.print(execStop - execStart);Serial.println("ms");
Serial.print("> ");
addr=0;
numByte=0;
blockSize=0;
numBlocks=0;
bufferIndex=0;
flashAddress=0;
totalBytesWritten=0;
totalBlocksWritten=0;
}
}
}
// **Abilita la scrittura**
void writeEnable() {
digitalWrite(CS_FLASH, LOW);
SPI.transfer(0x06);
digitalWrite(CS_FLASH, HIGH);
}
// Scrive una pagina da 256 byte [Opcode 0x02]
void writePage(uint32_t addr, char *data, int len) {
digitalWrite(CS_FLASH, LOW);
SPI.transfer(0x02);
SPI.transfer((addr >> 16) & 0xFF);
SPI.transfer((addr >> 8) & 0xFF);
SPI.transfer(addr & 0xFF);
for (int i = 0; i < len; i++) {
SPI.transfer(data[i]);
}
digitalWrite(CS_FLASH, HIGH);
}
// Scrive un singolo byte [Opcode 0x02]
void writeByte(uint32_t addr, byte data) {
writeEnable();
digitalWrite(CS_FLASH, LOW);
SPI.transfer(0x02); // PP PageProgram
SPI.transfer((addr >> 16) & 0xFF);
SPI.transfer((addr >> 8) & 0xFF);
SPI.transfer(addr & 0xFF);
SPI.transfer(data);
digitalWrite(CS_FLASH, HIGH);
waitForWriteCompletion();
Serial.print(" Byte written to address 0x");
Serial.print(addr, HEX);
Serial.print(": 0x");
Serial.println(data, HEX);
}
// **Attende il completamento della scrittura leggendo lo Status Register**
void waitForWriteCompletion() {
digitalWrite(CS_FLASH, LOW);
SPI.transfer(0x05); // Comando RDSR (Read Status Register)
while (SPI.transfer(0x00) & 0x01) { // Controlla il bit BUSY
delayMicroseconds(10);
}
digitalWrite(CS_FLASH, HIGH);
}
// Cancella tutta la memoria [Opcode 0xC7]
void chipErase() {
writeEnable();
digitalWrite(CS_FLASH, LOW);
SPI.transfer(0xC7);
digitalWrite(CS_FLASH, HIGH);
int i=0;
Serial.println("Chip Erase in progress...");
while (isBusy()) {
delay(500);
Serial.print(".");
i++;
if (i == 16){
Serial.println(".");
i=0;
}
}
Serial.println("Chip Erase completed!");
}
// **Cancella più settori specifici (4KB, 32KB, 64KB)**
void blockErase(uint32_t addr, int blockSize, int numBlocks) {
if (blockSize != 4096 && blockSize != 32768 && blockSize != 65536) {
Serial.println("Unsupported size! Use 4096, 32768, or 65536.");
return;
}
for (int i = 0; i < numBlocks; i++) {
writeEnable();
digitalWrite(CS_FLASH, LOW);
if (blockSize == 4096) SPI.transfer(0x20); // Sector Erase (4KB)
else if (blockSize == 32768) SPI.transfer(0x52); // Block Erase (32KB)
else if (blockSize == 65536) SPI.transfer(0xD8); // Block Erase (64KB)
SPI.transfer((addr >> 16) & 0xFF);
SPI.transfer((addr >> 8) & 0xFF);
SPI.transfer(addr & 0xFF);
digitalWrite(CS_FLASH, HIGH);
Serial.print("Block erase ");
Serial.print(blockSize / 1024);
Serial.print("KB from address 0x");
Serial.println(addr, HEX);
while (isBusy()) {
delay(100);
}
addr += blockSize;
}
Serial.println("All blocks are erased!");
}
// **Verifica se la memoria è occupata**
bool isBusy() {
digitalWrite(CS_FLASH, LOW);
SPI.transfer(0x05); // Comando RDSR (Read Status Register)
bool busy = SPI.transfer(0x00) & 0x01;
digitalWrite(CS_FLASH, HIGH);
return busy;
}
// **Legge lo Status Register e lo stampa**
void printStatusRegister() {
digitalWrite(CS_FLASH, LOW);
SPI.transfer(0x05); // Comando RDSR (Read Status Register)
byte status = SPI.transfer(0x00);
digitalWrite(CS_FLASH, HIGH);
Serial.print("Status Register: 0x");
Serial.println(status, HEX);
if (status & 0x01) Serial.println("Memory BUSY");
if (status & 0x02) Serial.println("Write Enabled");
if (status & 0x0C) Serial.println("Write protection");
}
// **Lettura di verifica con formattazione esadecimale**
// **Lettura di verifica con formattazione esadecimale e ASCII**
void readFlash(uint32_t addr, uint32_t numByte) {
const int bytesPerRow = 16; // Stampa massimo 16 byte per riga
uint32_t bytesToRead = numByte;
char asciiBuffer[bytesPerRow + 1]; // Buffer per i caratteri ASCII
asciiBuffer[bytesPerRow] = '\0'; // Null terminator per la stringa
Serial.println(" Reading SNOR:");
digitalWrite(CS_FLASH, LOW);
SPI.transfer(0x03); // Opcode Read Data
SPI.transfer((addr >> 16) & 0xFF);
SPI.transfer((addr >> 8) & 0xFF);
SPI.transfer(addr & 0xFF);
for (uint32_t i = 0; i < bytesToRead; i++) {
if (i % bytesPerRow == 0) {
// Stampa il buffer ASCII della riga precedente
if (i != 0) {
Serial.print(" |");
Serial.print(asciiBuffer);
Serial.print("|");
}
// Inizia una nuova riga
Serial.print("\n0x");
Serial.print(addr + i, HEX);
Serial.print(": ");
}
byte data = SPI.transfer(0x00);
// Stampa esadecimale con zero padding se minore di 16
Serial.print(data < 16 ? "0" : "");
Serial.print(data, HEX);
Serial.print(" ");
// Conversione in ASCII o sostituzione con un punto se non stampabile
asciiBuffer[i % bytesPerRow] = (data >= 32 && data <= 126) ? (char)data : '.';
}
digitalWrite(CS_FLASH, HIGH);
// Stampa l'ultima riga del buffer ASCII
uint32_t remainingBytes = bytesToRead % bytesPerRow;
if (remainingBytes > 0) {
// Aggiunge spazi per allineare l'output ASCII
for (uint32_t j = remainingBytes; j < bytesPerRow; j++) {
Serial.print(" "); // Spazio per ogni byte mancante
}
}
Serial.print(" |");
Serial.print(asciiBuffer);
Serial.print("|");
Serial.println("\n Read complete!");
}
// Legge il Device ID della memoria [Opcode 0x90]
void readREMS() {
digitalWrite(CS_FLASH, LOW);
SPI.transfer(0x90);
SPI.transfer(0x00);
SPI.transfer(0x00);
SPI.transfer(0x00);
byte manufacturerID = SPI.transfer(0x00);
byte deviceID = SPI.transfer(0x00);
digitalWrite(CS_FLASH, HIGH);
Serial.print("Manufacturer ID: 0x");
Serial.println(manufacturerID, HEX);
Serial.print("Device ID: 0x");
Serial.println(deviceID, HEX);
}
// **Legge il Device ID della memoria Opcode 0x9F**
void readRDID() {
digitalWrite(CS_FLASH, LOW);
SPI.transfer(0x9F); // Comando per leggere Device ID
byte manufacturerID = SPI.transfer(0x00);
byte memoryType = SPI.transfer(0x00);
byte memoryCapacity = SPI.transfer(0x00);
digitalWrite(CS_FLASH, HIGH);
Serial.print("Manufacturer ID: 0x");
Serial.println(manufacturerID, HEX);
Serial.print("Memory Type: 0x");
Serial.println(memoryType, HEX);
Serial.print("Memory Capacity: 0x");
Serial.println(memoryCapacity, HEX);
}
void hardwareRST() {
digitalWrite(RST_FLASH, HIGH);
delay(100);
digitalWrite(RST_FLASH, LOW);
delay(100);
digitalWrite(RST_FLASH, HIGH);
}
unsigned long calcCRC32(uint32_t startAddr, uint32_t numBytes) {
crc = ~0L; // Inizializza CRC32 con tutti i bit a 1
uint8_t data;
Serial.println("Opcode 03h");
Serial.println("Calculating CRC32...");
while (numBytes--) {
// Lettura di un byte dalla memoria SPI
digitalWrite(CS_FLASH, LOW);
SPI.transfer(0x03); // Opcode READ DATA
SPI.transfer((startAddr >> 16) & 0xFF);
SPI.transfer((startAddr >> 8) & 0xFF);
SPI.transfer(startAddr & 0xFF);
data = SPI.transfer(0x00);
digitalWrite(CS_FLASH, HIGH);
// Aggiornamento CRC con il nuovo byte letto
crc ^= data;
for (uint8_t i = 0; i < 8; i++) {
crc = (crc >> 1) ^ (0xEDB88320 & -(crc & 1));
}
startAddr++; // Incrementa l'indirizzo per il prossimo byte
}
Serial.println("CRC32 Calculation Complete!");
return ~crc; // XOR finale per completare il calcolo CRC32
/* libreria più efficente di 3 volte
CRC32 crc32;
uint32_t bytesRead = 0;
Serial.println("Calculating CRC32");
while (bytesRead < numBytes) {
uint32_t chunkSize = min((uint32_t)BUFFER_SIZE, numBytes - bytesRead);
// Inizio lettura SPI Flash
digitalWrite(CS_FLASH, LOW);
SPI.transfer(0x03); // Comando Read Data
SPI.transfer((startAddr >> 16) & 0xFF);
SPI.transfer((startAddr >> 8) & 0xFF);
SPI.transfer(startAddr & 0xFF);
// Lettura e aggiornamento CRC
for (uint32_t i = 0; i < chunkSize; i++) {
byte data = SPI.transfer(0x00);
crc32.update(data);
}
digitalWrite(CS_FLASH, HIGH);
// Aggiornamento indici
bytesRead += chunkSize;
startAddr += chunkSize;
// Evita il reset del watchdog ESP8266
// yield();
}
return crc32.finalize();
*/
}
void dumpFlashToUART() {
Serial.println(" Opcode 03h");
Serial.print(" Enter start address (hex): ");
uint32_t addr = strtoul(readSerialCommand().c_str(), NULL, 16);
Serial.print(" Enter number of bytes (hex): ");
uint32_t numBytes = strtoul(readSerialCommand().c_str(), NULL, 16);
Serial.print(" Enter the waiting time before/after acquisition: ");
int wait = strtoul(readSerialCommand().c_str(), NULL, 10);
pinMode(13, OUTPUT);
for (int i = 0;i < wait; i++){
digitalWrite(13, HIGH);
delay(500);
digitalWrite(13, LOW);
delay(500);
}
init_default_SPI();
uint32_t bytesRead = 0;
while (bytesRead < numBytes) {
//Se i byte rimanenti sono meno di 256.
uint32_t chunkSize = min((uint32_t)BUFFER_SIZE, numBytes - bytesRead);
// Inizio lettura SPI Flash
digitalWrite(CS_FLASH, LOW);
SPI.transfer(0x03); // Comando Read Data
SPI.transfer((addr >> 16) & 0xFF);
SPI.transfer((addr >> 8) & 0xFF);
SPI.transfer(addr & 0xFF);
// Attendere XON prima di inviare i dati
while (Serial.available() && Serial.read() == XOFF) {
delayMicroseconds(10); // Aspetta XON
}
// Lettura e invio dei dati via UART
for (uint32_t i = 0; i < chunkSize; i++) {
byte data = SPI.transfer(0x00);
Serial.write(data);
}
digitalWrite(CS_FLASH, HIGH);
// Aggiornamento indici
bytesRead += chunkSize;
addr += chunkSize;
}
}
void setSPI() {
Serial.println("Default: 2000000Hz - MSBFIRST - SPI_MODE0\n");
Serial.print("Enter SPI Clock (max 20000000 Hz): ");
clkSPI = readSerialCommand().toInt();
Serial.print("Enter SPI Bit Order (0=LSBFIRST, 1=MSBFIRST): ");
int bitOrderInput = readSerialCommand().toInt();
bitOrder = (bitOrderInput == 0) ? LSBFIRST : MSBFIRST;
Serial.print("Enter SPI Mode (0, 1, 2, 3): ");
int spiModeInput = readSerialCommand().toInt();
switch (spiModeInput) {
case 0: spiMode = SPI_MODE0; break;
case 1: spiMode = SPI_MODE1; break;
case 2: spiMode = SPI_MODE2; break;
case 3: spiMode = SPI_MODE3; break;
default:
Serial.println("Invalid mode");
return;
}
SPI.begin();
SPI.beginTransaction(SPISettings(clkSPI, bitOrder, spiMode));
hardwareRST();
}
void init_default_SPI() {
SPI.begin();
SPI.beginTransaction(SPISettings(clkSPI, bitOrder, spiMode));
pinMode(CS_FLASH, OUTPUT);
digitalWrite(CS_FLASH, HIGH);
pinMode(RST_FLASH, OUTPUT);
hardwareRST();
}
void customSPITransaction() {
Serial.print("Enter Write Byte (hex, e.g. opcode): ");
uint8_t writeByte = strtoul(readSerialCommand().c_str(), NULL, 16);
Serial.print("How many dummy bytes? ");
uint8_t numDummyBytes = readSerialCommand().toInt();
Serial.print("Dummy byte value (0=0x00, 1=0xFF): ");
uint8_t dummyType = readSerialCommand().toInt();
uint8_t dummyByte = (dummyType == 1) ? 0xFF : 0x00;
Serial.print("How many bytes do you want to read? ");
uint32_t numReadBytes = readSerialCommand().toInt();
// Inizio Transazione SPI
digitalWrite(CS_FLASH, LOW);
SPI.transfer(writeByte); // Invia l'OpCode o Write Byte
// Invio dummy bytes se necessario
for (uint8_t i = 0; i < numDummyBytes; i++) {
SPI.transfer(dummyByte);
}
// Lettura risposta
Serial.print("Response: ");
for (uint32_t i = 0; i < numReadBytes; i++) {
uint8_t data = SPI.transfer(0x00);
Serial.print(data < 16 ? "0" : "");
Serial.print(data, HEX);
Serial.print(" ");
}
digitalWrite(CS_FLASH, HIGH);
}
void receiveXmodem() {
uint8_t buffer[XMODEM_BUFFER_SIZE]; // Buffer per i dati
bool receiving = true;
uint32_t fileSize = 0;
uint32_t bytesWritten = 0; // Numero di byte già scritti in flash
uint8_t lastBlockNum = 0;
uint8_t retryCount = 0;
const uint8_t MAX_RETRIES = 10;
// Chiedi la dimensione del file
Serial.println(" Opcode 02h");
Serial.print("Enter file size (hex): ");
fileSize = strtoul(readSerialCommand().c_str(), NULL, 16);
Serial.print("Enter start address (hex): ");
flashAddress = strtoul(readSerialCommand().c_str(), NULL, 16);
while (!Serial.available()) {
Serial.write(NAK); // Segnala che Arduino è pronto
delay(500);
}
execStart = millis();
while (receiving) {
if (!Serial.available()) continue;
uint8_t header = Serial.read();
if (header == SOH) { // Start of Header 128-byte packet
uint8_t blockNum = Serial.read();
uint8_t blockNumInv = Serial.read();
Serial.readBytes(buffer, XMODEM_BUFFER_SIZE); // Legge 128 byte
uint8_t checksum = Serial.read(); // Riceve checksum
// Verifica il numero di blocco
if (blockNum != (uint8_t)~blockNumInv) {
Serial.write(NAK); // Errore, richiedi il blocco
retryCount++;
if (retryCount >= MAX_RETRIES) {
Serial.println("Too many errors. Aborting.");
Serial.write(CAN);
receiving = false;
}
continue;
}
// Se il blocco è duplicato, inviamo comunque ACK e lo ignoriamo
if (blockNum == lastBlockNum) {
Serial.write(ACK);
continue;
}
// Calcola checksum sommando tutti i bit, va in overflow unit8
// ovviamente fa parte del calcolo del chechsum.
uint8_t calcChecksum = 0;
for (int i = 0; i < XMODEM_BUFFER_SIZE; i++) {
calcChecksum += buffer[i];
}
if (calcChecksum != checksum) {
Serial.write(NAK);
retryCount++;
if (retryCount >= MAX_RETRIES) {
Serial.println("Too many errors. Aborting.");
Serial.write(CAN);
receiving = false;
}
continue;
}
// Determina quanti byte scrivere
uint32_t bytesToWrite = XMODEM_BUFFER_SIZE;
if (bytesWritten + XMODEM_BUFFER_SIZE > fileSize) {
bytesToWrite = fileSize - bytesWritten;
}
// Scrivi in flash solo i byte validi
writeEnable();
writePage(flashAddress, (char*)buffer, bytesToWrite);
waitForWriteCompletion();
flashAddress += bytesToWrite;
bytesWritten += bytesToWrite;
lastBlockNum = blockNum; // Salva l'ultimo blocco ricevuto
retryCount = 0; // Reset contatore errori
Serial.write(ACK); // Conferma ricezione del pacchetto
}
else if (header == EOT) { // End of Transmission
Serial.write(ACK);
Serial.println("XMODEM Transfer Completed!");
Serial.println("File saved into SPI NOR!");
Serial.print("Total bytes written: ");
Serial.println(bytesWritten);
execStop = millis();
Serial.print("\nExec. : ");Serial.print(execStop - execStart);Serial.println("ms");
receiving = false;
}
else if (header == CAN) { // Cancellazione da parte del trasmettitore
Serial.println("XMODEM Transfer Canceled.");
receiving = false;
}
}
}
void sendXmodem() {
uint8_t buffer[XMODEM_BUFFER_SIZE] = {0};
uint32_t fileSize = 0;
uint32_t bytesSent = 0;
uint8_t blockNum = 1;
uint8_t fillByte = 0xFF; // Default: 0xFF
Serial.println(" Opcode 03h");
Serial.print("Enter start address (hex): ");
uint32_t startAddress = strtoul(readSerialCommand().c_str(), NULL, 16);
Serial.print("Enter file size (hex): ");
fileSize = strtoul(readSerialCommand().c_str(), NULL, 16);
// Controlla se il file è multiplo di 128 byte
if (fileSize % XMODEM_BUFFER_SIZE != 0) {
Serial.println("\nWarning: File size is not a multiple of 128 bytes.");
Serial.print("Enter padding byte (hex, default 1A): ");
String fillByteStr = readSerialCommand();
if (fillByteStr.length() > 0) {
fillByte = strtoul(fillByteStr.c_str(), NULL, 16);
}
}
Serial.println("Waiting for receiver...");
// Attendi il NAK iniziale
while (Serial.available() == 0);
uint8_t response = Serial.read();
if (response != NAK) {
Serial.println("Receiver not ready. Aborting.");
return;
}
Serial.println("Sending XMODEM data...");
execStart = millis();
while (bytesSent < fileSize) {
uint32_t bytesToSend = min((uint32_t)XMODEM_BUFFER_SIZE, fileSize - bytesSent);
// **Leggi i dati dalla memoria SPI NOR**
digitalWrite(CS_FLASH, LOW);
SPI.transfer(0x03);
SPI.transfer((startAddress >> 16) & 0xFF);
SPI.transfer((startAddress >> 8) & 0xFF);
SPI.transfer(startAddress & 0xFF);
for (uint32_t i = 0; i < bytesToSend; i++) {
buffer[i] = SPI.transfer(0x00);
}
digitalWrite(CS_FLASH, HIGH);
// **Se l'ultimo pacchetto è inferiore a 128 byte, riempi con il valore scelto**
for (uint32_t i = bytesToSend; i < XMODEM_BUFFER_SIZE; i++) {
buffer[i] = fillByte;
}
// **Calcola checksum**
uint8_t checksum = 0;
for (uint32_t i = 0; i < XMODEM_BUFFER_SIZE; i++) {
checksum += buffer[i];
}
// **Invia pacchetto sempre di 128 byte**
Serial.write(SOH);
Serial.write(blockNum);
Serial.write(~blockNum);
Serial.write(buffer, XMODEM_BUFFER_SIZE);
Serial.write(checksum);
// **Aspetta ACK o NAK**
while (Serial.available() == 0);
response = Serial.read();
if (response == ACK) {
startAddress += bytesToSend;
bytesSent += bytesToSend;
blockNum++;
} else if (response == NAK) {
Serial.println("NAK received, resending block...");
continue;
} else {
Serial.println("Transmission aborted by receiver.");
return;
}
}
// **Invia EOT finché non riceve ACK**
do {
Serial.write(EOT);
delay(100);
while (Serial.available() == 0);
response = Serial.read();
} while (response != ACK);
Serial.println("XMODEM Transfer Completed!");
Serial.print("Total bytes sent: ");
Serial.println(bytesSent);
execStop = millis();
Serial.print("\nExec. time: "); Serial.print(execStop - execStart); Serial.println("ms");
}
//LECTERATURE
/*
-----.c_str()
.c_str(): Questo metodo della classe std::string restituisce un puntatore a una stringa C
(un array di caratteri terminato con un carattere nullo) che contiene il contenuto della stringa.
strtoul(..., NULL, 16): La funzione strtoul converte la stringa in un numero intero non firmato lungo
(unsigned long). NULL(ASCII) corrisponde a \0 in C
15
-----Esempio 1: Conversione di una stringa esadecimale
const char *hexStr = "1A3F";
char *endptr;
unsigned long value;
value = strtoul(hexStr, &endptr, 16); //base 16
printf("Valore convertito: %lu\n", value); // Output: 6719
printf("Stringa rimanente: %s\n", endptr); // Output: (una stringa vuota)
//DEbug
uint32_t indirizzo = 0x00000;
char dati[] = "Hello, world!";
int lunghezza = sizeof(dati) / sizeof(dati[0]);
writeEnable();
writePage(indirizzo, dati, lunghezza);
erase
blockErase(0,4096,1);
//XMODEM PACKET
+------+------------------------+--------------------------------------------------+
| Byte | Nome | Descrizione |
+------+------------------------+--------------------------------------------------+
| 1 | SOH (0x01) | Inizio di un blocco da 128 byte |
| 2 | Numero Blocco | Numero progressivo del blocco (da 0x01 a 0xFF) |
| 3 | Numero Blocco Invertito| Complemento a 255 del Numero Blocco (~Numero) |
| 4-131| Dati (128 byte) | Dati trasmessi nel pacchetto |
| 132 | Checksum (1 byte) | Somma modulo 256 dei 128 byte dati |
+------+------------------------+--------------------------------------------------+
//OLD readFlash senza ASCII print
void readFlash(uint32_t addr, uint32_t numByte) {
const int bytesPerRow = 16; // Stampa massimo 16 byte per riga
uint32_t bytesToRead = numByte;
Serial.println(" Reading SNOR:");
digitalWrite(CS_FLASH, LOW);
SPI.transfer(0x03); // Comando Read Data
SPI.transfer((addr >> 16) & 0xFF);
SPI.transfer((addr >> 8) & 0xFF);
SPI.transfer(addr & 0xFF);
for (uint32_t i = 0; i < bytesToRead; i++) {
if (i % bytesPerRow == 0) {
Serial.print("\n0x");
Serial.print(addr + i, HEX);
Serial.print(": ");
}
byte data = SPI.transfer(0x00);
Serial.print(data < 16 ? "0" : "");
Serial.print(data, HEX);
Serial.print(" ");
}
digitalWrite(CS_FLASH, HIGH);
Serial.println("\n Read complete!");
}
*/