hello guys. i have two arduino nano 33 ble sense, one is peripheral and one is central and i used them for sensor communication via bluetooth and it was working until i added the motor task. my motor driver is L298N and i have four motors. i want central to give peripheral a command about how to run the motors. and my peripheral is connected to L298N by cables. but now i don't know if this part of my code is working or not because my central serial monitor is just blank and i don't even know if two nano 33 are connected via bluetooth. what can i do, can you please help me, thank you...
central code:
/*
-----------------------------------------------------------------------------------------------
| BLE_IMU_CENTRAL - Wireless IMU Communication with peripheral device
|
| Arduino Boards Tested: Nano 33 BLE Sense as a peripheral & Nano 33 BLE as central.
| Code not tested for multiple peripherals
|
| This sketch works alongside the BLE_IMU_PERIPHERAL sketch to communicate with another Arduino BLE.
| This sketch can also be used with a generic BLE central app, like LightBlue (iOS and Android) or
| nRF Connect (Android), to interact with the services and characteristics created in this sketch.
|
| This example code is adapted from the ArduinoBLE library, available in the public domain.
| Authors: Aaron Yurkewich & Pilar Zhang Qiu
| Latest Update: 25/02/2021
-----------------------------------------------------------------------------------------------
*/
#include <ArduinoBLE.h>
//PASTEBEGIN
#include <Arduino_LSM9DS1.h>
//PASTEFINISH
// ------------------------------------------ BLE UUIDs ------------------------------------------
#define BLE_UUID_PERIPHERAL "19B10000-E8F2-537E-4F6C-D104768A1214" //please change to a unique value that matches BLE_IMU_PERIPHERAL
#define BLE_UUID_CHARACT_LED "19B10001-E8F2-537E-4F6C-E104768A1214" //please change to a unique value that matches BLE_IMU_PERIPHERAL
#define BLE_UUID_CHARACT_GYROX "29B10001-E8F2-537E-4F6C-a204768A1215" //please change to a unique value that matches BLE_IMU_PERIPHERAL
#define BLE_UUID_CHARACT_GYROY "39B10001-E8F2-537E-4F6C-a204768A1215" //please change to a unique value that matches BLE_IMU_PERIPHERAL
#define BLE_UUID_CHARACT_GYROZ "49B10001-E8F2-537E-4F6C-a204768A1215" //please change to a unique value that matches BLE_IMU_PERIPHERAL
//PASTEBEGIN
#define BLE_UUID_CHARACT_ACCA "59B10001-E8F2-537E-4F6C-a204768A1215" //please chnage to a unique value that matches BLE_IMU_CENTRAL
#define BLE_UUID_CHARACT_ACCB "69B10001-E8F2-537E-4F6C-a204768A1215" //please chnage to a unique value that matches BLE_IMU_CENTRAL
#define BLE_UUID_CHARACT_ACCC "79B10001-E8F2-537E-4F6C-a204768A1215" //please chnage to a unique value that matches BLE_IMU_CENTRAL
#define BLE_UUID_CHARACT_MAGK "89B10001-E8F2-537E-4F6C-a204768A1215" //please chnage to a unique value that matches BLE_IMU_CENTRAL
#define BLE_UUID_CHARACT_MAGL "99B10001-E8F2-537E-4F6C-a204768A1215" //please chnage to a unique value that matches BLE_IMU_CENTRAL
#define BLE_UUID_CHARACT_MAGM "09B10001-E8F2-537E-4F6C-a204768A1215" //please chnage to a unique value that matches BLE_IMU_CENTRAL
//PASTEFINISH
//begin
BLEService motorService("19B10000-E8F2-537E-4F6C-E104768A1214");
BLEByteCharacteristic motorControlChar("19B10001-E8F2-537E-4F6C-D104768A1214", BLERead | BLEWrite);
//end
// ------------------------------------------ VOID SETUP ------------------------------------------
void setup() {
Serial.begin(9600);
while (!Serial);
// configure the button pin as input
pinMode(LED_BUILTIN, OUTPUT);
// initialize the BLE hardware
BLE.begin();
Serial.println("BLE Central - Gyroscope control");
// start scanning for peripherals
BLE.scanForUuid(BLE_UUID_PERIPHERAL);//
}
// ------------------------------------------ VOID LOOP ------------------------------------------
void loop() {
// check if a peripheral has been discovered
BLEDevice peripheral = BLE.available();
if (peripheral) {
// discovered a peripheral, print out address, local name, and advertised service
Serial.print("Found ");
Serial.print(peripheral.address());
Serial.print(" '");
Serial.print(peripheral.localName());
Serial.print("' ");
Serial.print("' ");
Serial.print(peripheral.advertisedServiceUuid());
Serial.println();
if (peripheral.localName() != "BLE_IMU") {
return;
}
// stop scanning
BLE.stopScan();
LED_IMU(peripheral);
// peripheral disconnected, start scanning again
BLE.scanForUuid(BLE_UUID_PERIPHERAL);
}
}
// ------------------------------------------ FUNCTIONS ------------------------------------------
void LED_IMU(BLEDevice peripheral) {
// connect to the peripheral
Serial.println("Connecting ...");
if (peripheral.connect()) {
Serial.println("Connected");
} else {
Serial.println("Failed to connect!");
return;
}
// discover peripheral attributes
Serial.println("Discovering attributes ...");
if (peripheral.discoverAttributes()) {
Serial.println("Attributes discovered");
} else {
Serial.println("Attribute discovery failed!");
peripheral.disconnect();
return;
}
// retrieve the LED characteristic
BLECharacteristic ledCharacteristic = peripheral.characteristic(BLE_UUID_CHARACT_LED);
BLECharacteristic gyroXCharacteristic = peripheral.characteristic(BLE_UUID_CHARACT_GYROX);
BLECharacteristic gyroYCharacteristic = peripheral.characteristic(BLE_UUID_CHARACT_GYROY);
BLECharacteristic gyroZCharacteristic = peripheral.characteristic(BLE_UUID_CHARACT_GYROZ);
//PASTEBEGIN
BLECharacteristic accACharacteristic = peripheral.characteristic(BLE_UUID_CHARACT_ACCA);
BLECharacteristic accBCharacteristic = peripheral.characteristic(BLE_UUID_CHARACT_ACCB);
BLECharacteristic accCCharacteristic = peripheral.characteristic(BLE_UUID_CHARACT_ACCC);
BLECharacteristic magKCharacteristic = peripheral.characteristic(BLE_UUID_CHARACT_MAGK);
BLECharacteristic magLCharacteristic = peripheral.characteristic(BLE_UUID_CHARACT_MAGL);
BLECharacteristic magMCharacteristic = peripheral.characteristic(BLE_UUID_CHARACT_MAGM);
//PASTEFINISH
// check if an specific BLE characteristic exists
if (!ledCharacteristic) {
Serial.println("Peripheral does not have LED characteristic!");
peripheral.disconnect();
return;
} else if (!ledCharacteristic.canWrite()) {
Serial.println("Peripheral does not have a writable LED characteristic!");
peripheral.disconnect();
return;
}
int buttonState = 0;
float x, y, z, a, b, c, k, l, m;
while (peripheral.connected()) {
//begin
unsigned long start = millis();
while (millis() - start < 2000){
motorControlChar.writeValue(1);
delay(100);
}
start = millis();
while (millis() - start < 100){
motorControlChar.writeValue(3);
delay(100);
}
start = millis();
while (millis() - start < 2000){
motorControlChar.writeValue(1);
delay(100);
}
start = millis();
while (millis() - start < 100){
motorControlChar.writeValue(4);
delay(100);
}
start = millis();
while (millis() - start < 2000){
motorControlChar.writeValue(1);
delay(100);
}
start = millis();
while (millis() - start < 100){
motorControlChar.writeValue(3);
delay(100);
}
start = millis();
while (millis() - start < 2000){
motorControlChar.writeValue(2);
delay(100);
}
start = millis();
while (millis() - start < 100){
motorControlChar.writeValue(3);
delay(100);
}
start = millis();
while (millis() - start < 2000){
motorControlChar.writeValue(2);
delay(100);
}
start = millis();
while (millis() - start < 2000){
motorControlChar.writeValue(4);
delay(100);
}
//end
// while the peripheral is connected
// read the gyroscope values
gyroXCharacteristic.readValue( &x, 4 );
gyroYCharacteristic.readValue( &y, 4 );
gyroZCharacteristic.readValue( &z, 4 );
//PASTEBEGIN
accACharacteristic.readValue( &a, 4 );
accBCharacteristic.readValue( &b, 4 );
accCCharacteristic.readValue( &c, 4 );
magKCharacteristic.readValue( &k, 4 );
magLCharacteristic.readValue( &l, 4 );
magMCharacteristic.readValue( &m, 4 );
//PASTEFINISH
Serial.print(millis());
Serial.print('\t');
Serial.print(x);
Serial.print('\t');
Serial.print(y);
Serial.print('\t');
Serial.print(z);
Serial.print('\t');
//PASTEBEGIN
Serial.print(a);
Serial.print('\t');
Serial.print(b);
Serial.print('\t');
Serial.print(c);
Serial.print('\t');
Serial.print(k);
Serial.print('\t');
Serial.print(l);
Serial.print('\t');
Serial.println(m);
//PASTEFINISH
// make the LED blink
if (buttonState == 0)
{buttonState = 1;}
else if (buttonState == 1)
{buttonState = 0;}
digitalWrite(LED_BUILTIN, buttonState);
if (buttonState == 0) {
// write 0x01 to turn the LED on
ledCharacteristic.writeValue((byte)0x01);
} else {
// write 0x00 to turn the LED off
ledCharacteristic.writeValue((byte)0x00);
}
}
Serial.println("Peripheral disconnected");
}
peripheral code:
/*
-----------------------------------------------------------------------------------------------
| BLE_IMU_PERIPHERAL - Wireless IMU Communication with central device
|
| Arduino Boards Tested: Nano 33 BLE Sense as a peripheral & Nano 33 BLE as central.
| Code not tested for multiple peripherals
| This sketch works alongside the BLE_IMU_CENTRAL sketch to communicate with an Arduino Nano 33 BLE.
| This sketch can also be used with a generic BLE central app, like LightBlue (iOS and Android) or
| nRF Connect (Android), to interact with the services and characteristics created in this sketch.
| This example code is adapted from the ArduinoBLE library, available in the public domain.
| Authors: Aaron Yurkewich & Pilar Zhang Qiu
| Latest Update: 25/02/2021
-----------------------------------------------------------------------------------------------
*/
#include <ArduinoBLE.h>
#include <Arduino_LSM9DS1.h>
//#include <Arduino_LSM6DS3.h> // Uncomment this if your peripheral is the Nano 33 IoT
// ------------------------------------------ BLE UUIDs ------------------------------------------
#define BLE_UUID_PERIPHERAL "19B10000-E8F2-537E-4F6C-D104768A1214" //please chnage to a unique value that matches BLE_IMU_CENTRAL
#define BLE_UUID_CHARACT_LED "19B10001-E8F2-537E-4F6C-E104768A1214" //please chnage to a unique value that matches BLE_IMU_CENTRAL
#define BLE_UUID_CHARACT_GYROX "29B10001-E8F2-537E-4F6C-a204768A1215" //please chnage to a unique value that matches BLE_IMU_CENTRAL
#define BLE_UUID_CHARACT_GYROY "39B10001-E8F2-537E-4F6C-a204768A1215" //please chnage to a unique value that matches BLE_IMU_CENTRAL
#define BLE_UUID_CHARACT_GYROZ "49B10001-E8F2-537E-4F6C-a204768A1215" //please chnage to a unique value that matches BLE_IMU_CENTRAL
//PASTEBEGIN
#define BLE_UUID_CHARACT_ACCA "59B10001-E8F2-537E-4F6C-a204768A1215" //please chnage to a unique value that matches BLE_IMU_CENTRAL
#define BLE_UUID_CHARACT_ACCB "69B10001-E8F2-537E-4F6C-a204768A1215" //please chnage to a unique value that matches BLE_IMU_CENTRAL
#define BLE_UUID_CHARACT_ACCC "79B10001-E8F2-537E-4F6C-a204768A1215" //please chnage to a unique value that matches BLE_IMU_CENTRAL
#define BLE_UUID_CHARACT_MAGK "89B10001-E8F2-537E-4F6C-a204768A1215" //please chnage to a unique value that matches BLE_IMU_CENTRAL
#define BLE_UUID_CHARACT_MAGL "99B10001-E8F2-537E-4F6C-a204768A1215" //please chnage to a unique value that matches BLE_IMU_CENTRAL
#define BLE_UUID_CHARACT_MAGM "09B10001-E8F2-537E-4F6C-a204768A1215" //please chnage to a unique value that matches BLE_IMU_CENTRAL
//PASTEFINISH
BLEService LED_IMU_Service(BLE_UUID_PERIPHERAL); // BLE LED Service
//begin
BLEService motorService("19B10000-E8F2-537E-4F6C-E104768A1214");
BLEByteCharacteristic motorControlChar("19B10001-E8F2-537E-4F6C-D104768A1214", BLERead | BLEWrite);
//end
// BLE LED Switch Characteristic - custom 128-bit UUID, read and writable by central
BLEByteCharacteristic switchCharacteristic(BLE_UUID_CHARACT_LED, BLERead | BLEWrite);
BLEFloatCharacteristic gyroXCharacteristic(BLE_UUID_CHARACT_GYROX, BLERead | BLENotify | BLEWrite);
BLEFloatCharacteristic gyroYCharacteristic(BLE_UUID_CHARACT_GYROY, BLERead | BLENotify | BLEWrite);
BLEFloatCharacteristic gyroZCharacteristic(BLE_UUID_CHARACT_GYROZ, BLERead | BLENotify | BLEWrite);
//PASTEBEGIN
BLEFloatCharacteristic accACharacteristic(BLE_UUID_CHARACT_ACCA, BLERead | BLENotify | BLEWrite);
BLEFloatCharacteristic accBCharacteristic(BLE_UUID_CHARACT_ACCB, BLERead | BLENotify | BLEWrite);
BLEFloatCharacteristic accCCharacteristic(BLE_UUID_CHARACT_ACCC, BLERead | BLENotify | BLEWrite);
BLEFloatCharacteristic magKCharacteristic(BLE_UUID_CHARACT_MAGK, BLERead | BLENotify | BLEWrite);
BLEFloatCharacteristic magLCharacteristic(BLE_UUID_CHARACT_MAGL, BLERead | BLENotify | BLEWrite);
BLEFloatCharacteristic magMCharacteristic(BLE_UUID_CHARACT_MAGM, BLERead | BLENotify | BLEWrite);
//PASTEFINISH
//begin
int enA=3;
int enB=5;
int in1=2;
int in2=4;
int in3=6;
int in4=7;
//end
const int ledPin = LED_BUILTIN; // pin to use for the LED
float x, y, z, a, b, c, k, l, m;
// ------------------------------------------ VOID SETUP ------------------------------------------
void setup() {
//PASTEBEGIN
pinMode(enA, OUTPUT);
pinMode(enB, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
//PASTEFINISH
Serial.begin(9600);
//while (!Serial); //uncomment to view the IMU data in the peripheral serial monitor
// begin IMU initialization
if (!IMU.begin()) {
Serial.println("Failed to initialize IMU!");
while (1);
}
// set LED pin to output mode
pinMode(ledPin, OUTPUT);
// begin BLE initialization
if (!BLE.begin()) {
Serial.println("starting BLE failed!");
while (1);
}
// set advertised local name and service UUID:
BLE.setLocalName("BLE_IMU");
BLE.setAdvertisedService(LED_IMU_Service);
//begin
BLE.setLocalName("MotorControlPeripheral");
BLE.setAdvertisedService(motorService);
motorService.addCharacteristic(motorControlChar);
//end
// add the characteristic to the service
LED_IMU_Service.addCharacteristic(switchCharacteristic);
LED_IMU_Service.addCharacteristic(gyroXCharacteristic);
LED_IMU_Service.addCharacteristic(gyroYCharacteristic);
LED_IMU_Service.addCharacteristic(gyroZCharacteristic);
//PASTEBEGIN
LED_IMU_Service.addCharacteristic(accACharacteristic);
LED_IMU_Service.addCharacteristic(accBCharacteristic);
LED_IMU_Service.addCharacteristic(accCCharacteristic);
LED_IMU_Service.addCharacteristic(magKCharacteristic);
LED_IMU_Service.addCharacteristic(magLCharacteristic);
LED_IMU_Service.addCharacteristic(magMCharacteristic);
//PASTEFINISH
// add service
BLE.addService(LED_IMU_Service);
//begin
BLE.addService(motorService);
//end
// set the initial value for the characeristic:
switchCharacteristic.writeValue(0);
//begin
motorControlChar.writeValue(0);
//end
// start advertising
BLE.advertise();
Serial.println("BLE LED Peripheral");
//PASTEBEGIN
/*Serial.begin(9600);
while (!Serial);
Serial.println("Started");
if (!IMU.begin()) {
Serial.println("Failed to initialize IMU!");
while (1);
}
Serial.print("Accelerometer sample rate = ");
Serial.print(IMU.accelerationSampleRate());
Serial.println(" Hz");
Serial.println();
Serial.println("Acceleration in g's");
Serial.println("A\tB\tC");
if (!IMU.begin()) {
Serial.println("Failed to initialize IMU!");
while (1);
}
Serial.print("Magnetic field sample rate = ");
Serial.print(IMU.magneticFieldSampleRate());
Serial.println(" Hz");
Serial.println();
Serial.println("Magnetic Field in uT");
Serial.println("K\tL\tM");
*/
//PASTEFINISH
}
// ------------------------------------------ VOID LOOP ------------------------------------------
void loop() {
// listen for BLE peripherals to connect:
BLEDevice central = BLE.central();
// if a central is connected to peripheral:
if (central) {
Serial.print("Connected to central: ");
// print the central's MAC address:
Serial.println(central.address());
// while the central is still connected to peripheral:
while (central.connected()) {
// if the remote device wrote to the characteristic,
// use the value to control the LED:
if (switchCharacteristic.written()) {
if (switchCharacteristic.value()) { // any value other than 0
Serial.println("LED on");
digitalWrite(ledPin, HIGH); // will turn the LED on
} else { // a 0 value
Serial.println(F("LED off"));
digitalWrite(ledPin, LOW); // will turn the LED off
}
}
if (IMU.gyroscopeAvailable()) {
IMU.readGyroscope(x, y, z);
gyroXCharacteristic.writeValue(x);
gyroYCharacteristic.writeValue(y);
gyroZCharacteristic.writeValue(z);
Serial.print(millis());
Serial.print('\t');
Serial.print(x);
Serial.print('\t');
Serial.print(y);
Serial.print('\t');
Serial.print(z);
Serial.print('\t');
}
//PASTEBEGIN
if (IMU.accelerationAvailable()) {
IMU.readAcceleration(a, b, c);
accACharacteristic.writeValue(a);
accBCharacteristic.writeValue(b);
accCCharacteristic.writeValue(c);
Serial.print(a);
Serial.print('\t');
Serial.print(b);
Serial.print('\t');
Serial.print(c);
Serial.print('\t');
}
if (IMU.magneticFieldAvailable()) {
IMU.readMagneticField(k, l, m);
magKCharacteristic.writeValue(k);
magLCharacteristic.writeValue(l);
magMCharacteristic.writeValue(m);
Serial.print(k);
Serial.print('\t');
Serial.print(l);
Serial.print('\t');
Serial.println(m);
}
//PASTEFINISH
//begin
if (motorControlChar.written()) {
byte motorCommand = motorControlChar.value();
// Motor kontrolü
if (motorCommand == 1) {
// İleri düz hareket
analogWrite(enA, 120);
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
analogWrite(enB, 120);
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
} else if (motorCommand == 2) {
// Geri düz hareket
analogWrite(enA, 120);
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
analogWrite(enB, 120);
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
} else if (motorCommand == 3) {
// İleri sağa hareket
analogWrite(enA, 120);
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
analogWrite(enB, 120);
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
} else if (motorCommand == 4) {
// İleri sola hareket
analogWrite(enA, 120);
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
analogWrite(enB, 120);
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
} else if (motorCommand == 0) {
// Dur
analogWrite(enA, 0);
analogWrite(enB, 0);
}
}
//end
}
// when the central disconnects, print it out:
Serial.print(F("Disconnected from central: "));
Serial.println(central.address());
}
}
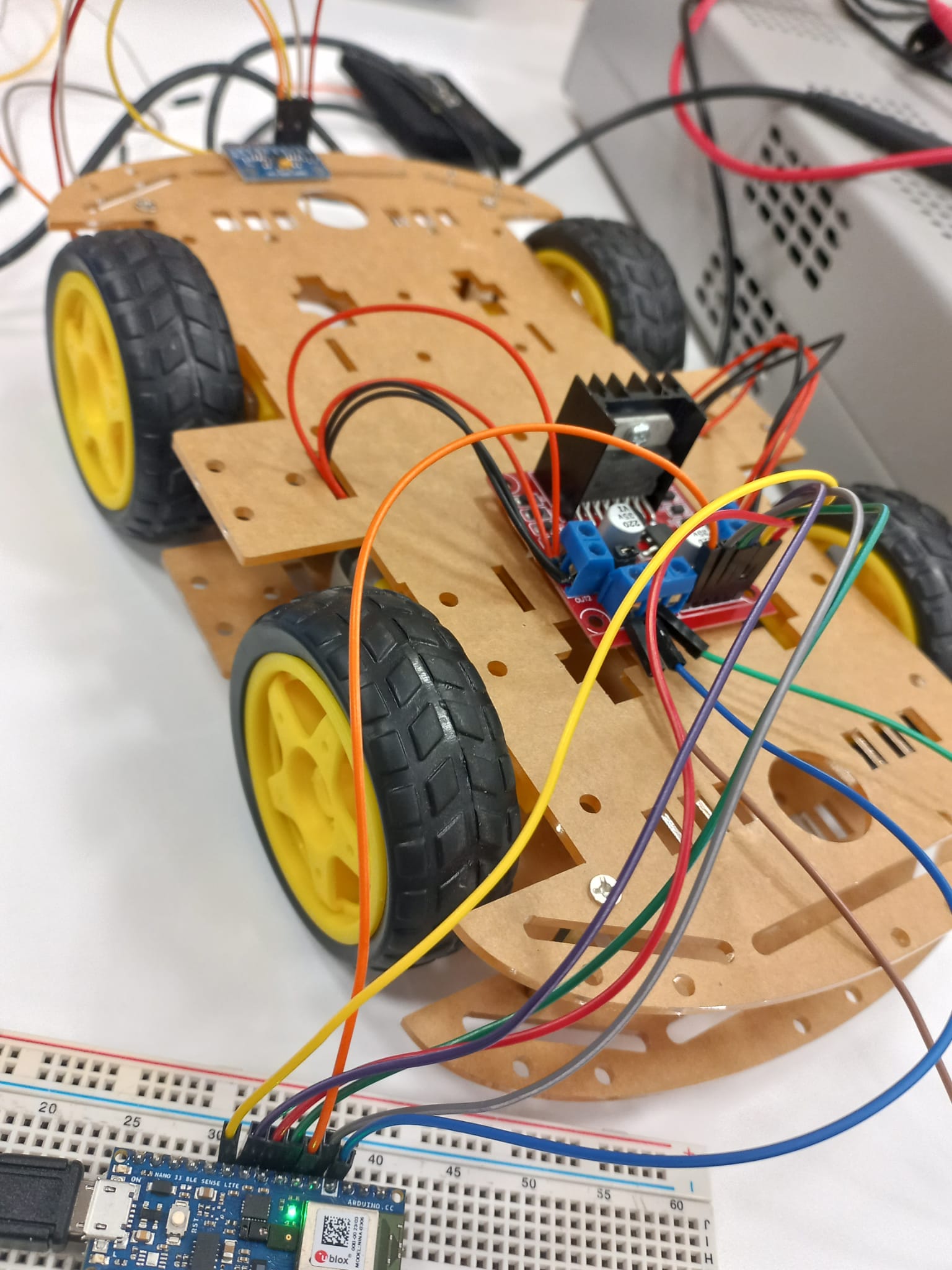
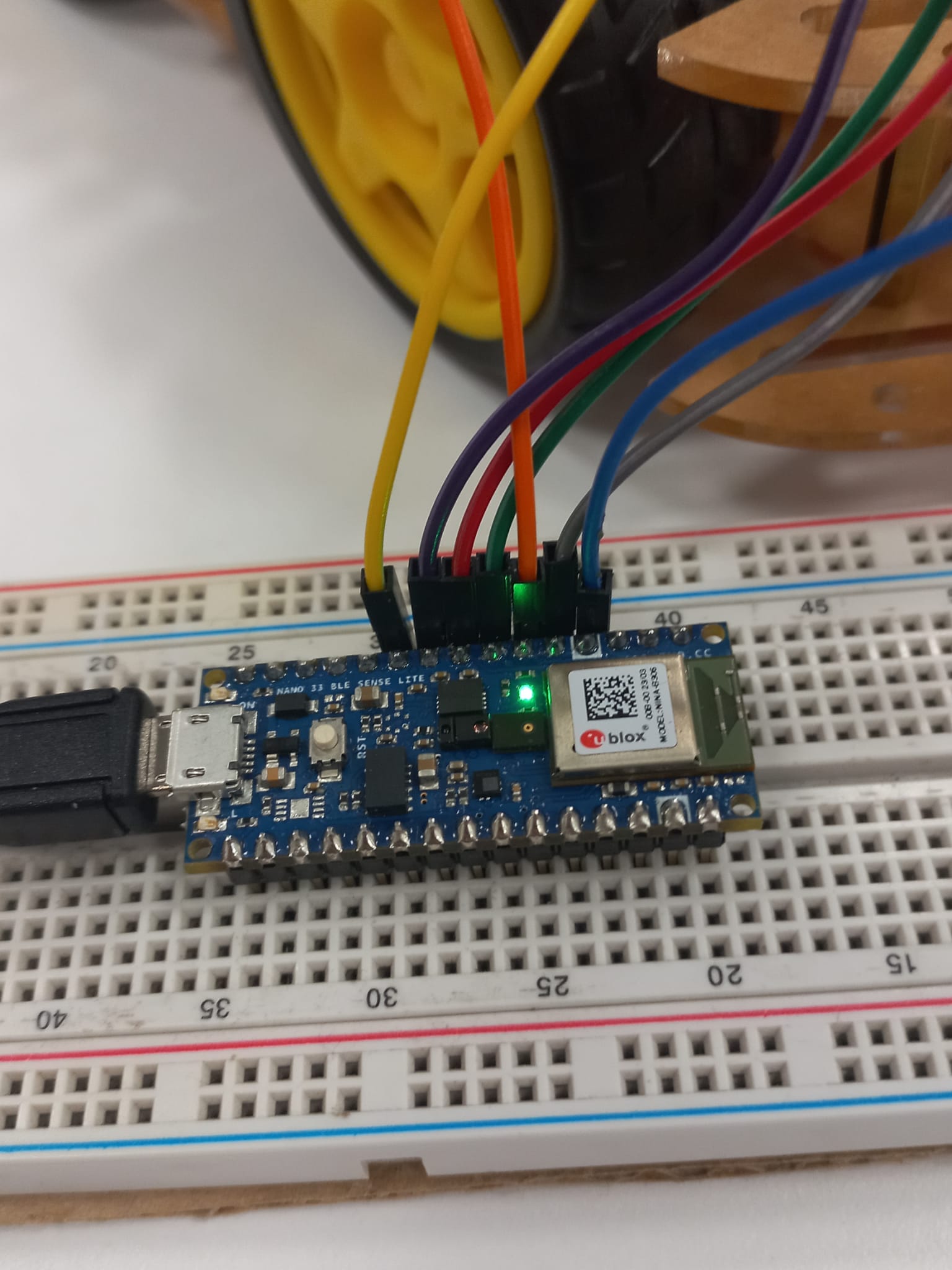
peripheral device which is connected to L298N by cables:
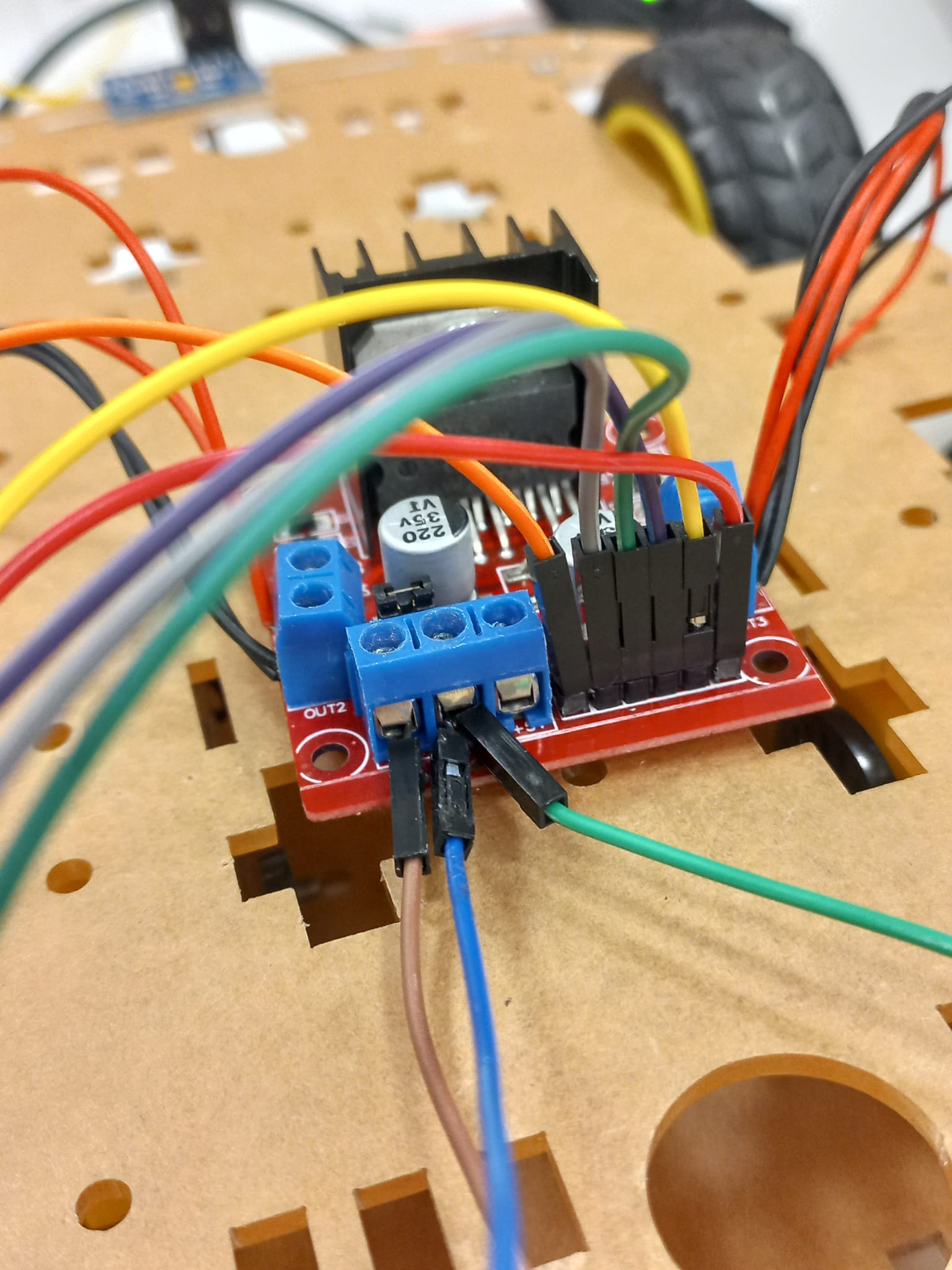
L298N:
motors: