I am very curious and very confused. Assume that the project is a Solar Tracker for Solar energy harvesting.
How can the SolarPosition Library be used? What would the skeleton of the sketch would look like?
I believe the library has the cpp and h files already so the calculations isn't necessary to be included on your actual code? (Correct me if I'm wrong)
How is it utilized to move the motors directly pointing at the sun?
Does it use an GPS or RTC modules like a DS3231? If so, does it include any modification?
The Solar Position Library has documentation, and includes example programs whose functions should be obvious when you run them. It gives sky coordinates of the sun at a given time and place.
I take it that you do not yet have a clear idea of the actual tracker mechanism, and that really needs to be decided. There are many examples of solar trackers on the web.
// solarTimeRTC
// Arduino example sketch for SolarPosition library
//
// Calculate solar position from time and location information
// using an RTC as a time source.
// 2017 Ken Willmott
// Arduino library based on the program "Arduino Uno and Solar Position Calculations"
// (c) David R. Brooks, which can be found at http://www.instesre.org/ArduinoDocuments.htm
// and issued under the Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License:
// https://creativecommons.org/licenses/by-nc-nd/4.0/
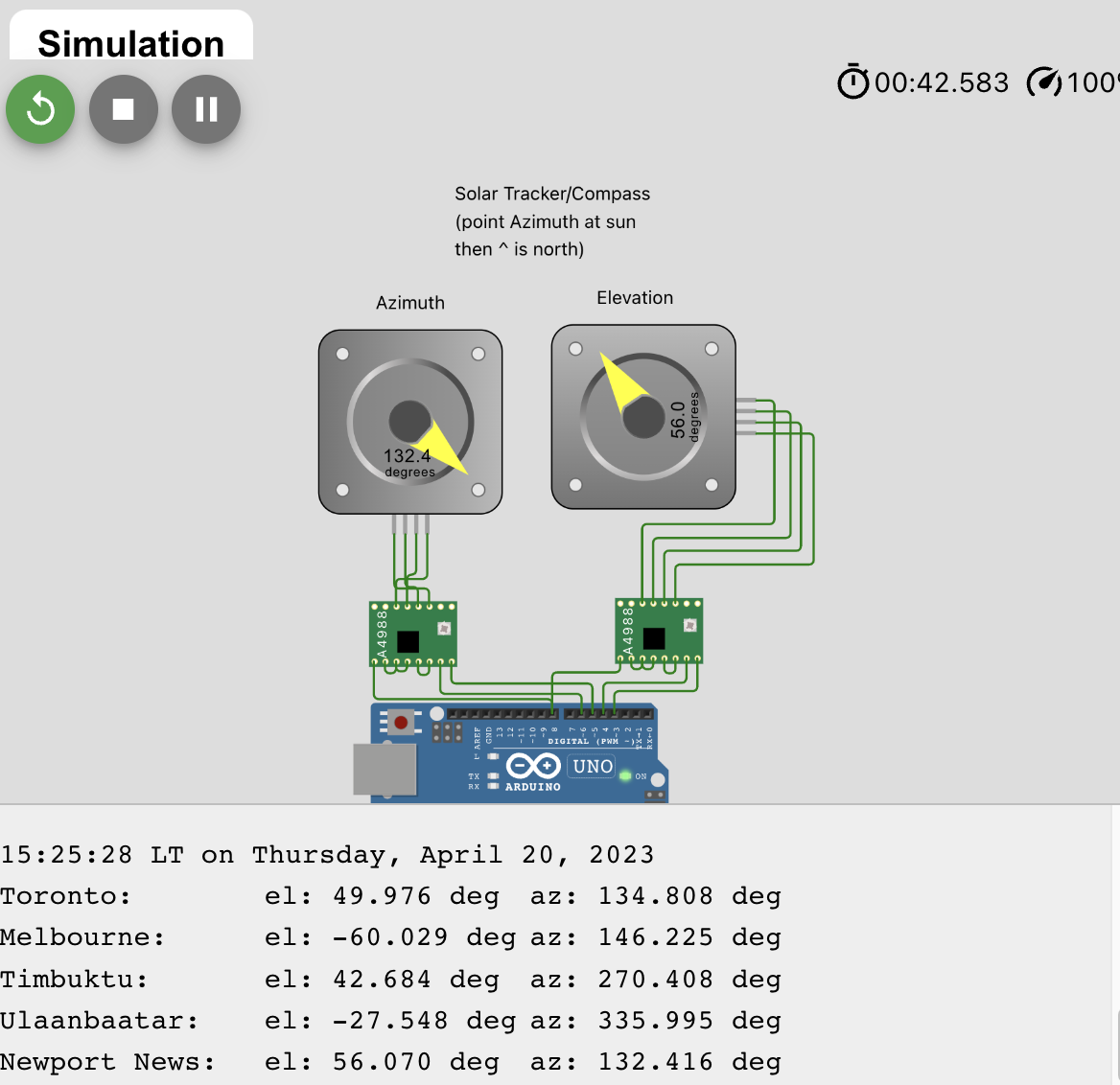
// Simulation at https://wokwi.com/projects/362461186756144129
// Based on https://wokwi.com/projects/362382128060882945
// written for https://forum.arduino.cc/t/solar-position-library-for-solar-trackers/1116831/5
const byte azimuthStepPin = 6;
const byte azimuthDirPin = 5;
const byte elevationStepPin = 4;
const byte elevationDirPin = 3;
const int stepsPerRevolution = 3200; // 16x microstepping
// Note that for the Wokwi stepper simulation, I used "gearRatio":"16:1" in diagram.json
// versus the 16:1 microstepping in thr drivers because the motor sim
// only displays 1/2 step microstepping
// https://docs.wokwi.com/parts/wokwi-stepper-motor#simulation-behavior
// Also note the wiring order is a bit odd to get the initial position
// to display 0° and to get the angle signs to match.
//
#include "SolarPosition.h" // https://github.com/KenWillmott/SolarPosition
// choose your RTC library (DS1307 lib can also read from the DS3231 IC):
//#include <DS3232RTC.h>
#include <DS1307RTC.h> // https://github.com/PaulStoffregen/DS1307RTC
#include <AccelStepper.h> // http://www.airspayce.com/mikem/arduino/AccelStepper/
AccelStepper azimuthStepper(AccelStepper::DRIVER, azimuthStepPin, azimuthDirPin);
AccelStepper elevationStepper(AccelStepper::DRIVER, elevationStepPin, elevationDirPin);
// Wokwi sets the default RTC to match the local computer's system time,
// if your local computer's time is not UTC, you need an offset
const int localUtcOffsetHours = 4;// Adjust RTC from default Wokwi local time setting to UTC:
// number of decimal digits to print
const uint8_t digits = 3;
// some test positions:
SolarPosition Toronto(43.653109, -79.386304); // Toronto, Canada
SolarPosition Timbuktu(16.775214, -3.007455); // Timbuktu, Mali, Africa
SolarPosition Melbourne(-37.668987, 144.841006); //Melbourne Airport (MEL)
SolarPosition Ulaanbaatar(47.847410, 106.769004); //Ulaanbaatar Airport (ULN)
SolarPosition NewportNews(37.1303, -76.5026); //NewportNews Airport (PHF)
// program begins
void setup()
{
Serial.begin(9600);
Serial.println(F("\tSolar Position Demo"));
if (localUtcOffsetHours != 0 ) { // make local/UTC adjustments
unsigned long newTime = RTC.get() + 3600L * localUtcOffsetHours;
RTC.set(newTime);
}
// set the Time service as the time provider
SolarPosition::setTimeProvider(RTC.get);
azimuthStepper.setMaxSpeed(200.0);
azimuthStepper.setAcceleration(200.0);
azimuthStepper.moveTo(0);
elevationStepper.setMaxSpeed(200.0);
elevationStepper.setAcceleration(200.0);
elevationStepper.moveTo(0);
}
void loop()
{
// now test the real time methods:
//
const uint32_t moveInterval = 15000l;
static uint32_t lastMoveTime = -(moveInterval -1000);
uint32_t now = millis();
azimuthStepper.run();
elevationStepper.run();
if (now - lastMoveTime >= moveInterval) {
lastMoveTime += moveInterval;
Serial.println();
printTime(RTC.get());
Serial.print(F("Toronto:\t"));
printSolarPosition(Toronto.getSolarPosition(), digits);
Serial.print(F("Melbourne:\t"));
printSolarPosition(Melbourne.getSolarPosition(), digits);
Serial.print(F("Timbuktu:\t"));
printSolarPosition(Timbuktu.getSolarPosition(), digits);
Serial.print(F("Ulaanbaatar:\t"));
printSolarPosition(Ulaanbaatar.getSolarPosition(), digits);
Serial.print(F("Newport News:\t"));
printSolarPosition(NewportNews.getSolarPosition(), digits);
azimuthStepper.moveTo(stepsPerRevolution * ( -NewportNews.getSolarAzimuth()) / 360.0);
elevationStepper.moveTo(stepsPerRevolution * ( -NewportNews.getSolarElevation()) / 360.0);
}
}
// Print a solar position to serial
//
void printSolarPosition(SolarPosition_t pos, int numDigits)
{
Serial.print(F("el: "));
Serial.print(pos.elevation, numDigits);
Serial.print(F(" deg\t"));
Serial.print(F("az: "));
Serial.print(pos.azimuth, numDigits);
Serial.println(F(" deg"));
}
// Print a time to serial
//
void printTime(time_t t)
{
tmElements_t someTime;
breakTime(t, someTime);
if (someTime.Hour < 10)Serial.print('0');
Serial.print(someTime.Hour);
Serial.print(F(":"));
if (someTime.Minute < 10)Serial.print('0');
Serial.print(someTime.Minute);
Serial.print(F(":"));
if (someTime.Second < 10)Serial.print('0');
Serial.print(someTime.Second);
Serial.print(localUtcOffsetHours == 0 ? F(" UTC on "): F(" LT on "));
Serial.print(dayStr(someTime.Wday));
Serial.print(F(", "));
Serial.print(monthStr(someTime.Month));
Serial.print(F(" "));
Serial.print(someTime.Day);
Serial.print(F(", "));
Serial.println(tmYearToCalendar(someTime.Year));
}
Hi! Sorry for the late reply. I did post a code using the SolarPosition Library. However, I am having trouble syncing the time and date accurately. I found another: Solar Calculator and this library works the easiest for me. Currently, I am working on positioning the motors and also on how I will be testing the Solar tracker in comparison to fixed one (Do I need a current and voltage sensors for this or is there a simple and easy way to identify the output of the panels?). Additionally, I considered creating an app from MIT APP INVENTOR for smart monitoring, the data was transmitted using an HC-05 Bluetooth module.
Btw, Thanks to the info you have given, really helps a lot!