With the sketch below, I'm getting the following errors:
#include <Braccio.h>
void setup() {
Braccio.begin();
}
void loop() {
// put your main code here, to run repeatedly:
}
/var/folders/rn/55y62jb51xnbc4ccbqyd__540000gn/T//ccYwaZJh.ltrans0.ltrans.o: In function 'begin':
/Users/marcofusco/Documents/Arduino/libraries/Braccio/src/Braccio.cpp:59: undefined reference to 'base'
/Users/marcofusco/Documents/Arduino/libraries/Braccio/src/Braccio.cpp:59: undefined reference to 'base'
/Users/marcofusco/Documents/Arduino/libraries/Braccio/src/Braccio.cpp:60: undefined reference to 'shoulder'
/Users/marcofusco/Documents/Arduino/libraries/Braccio/src/Braccio.cpp:60: undefined reference to 'shoulder'
/Users/marcofusco/Documents/Arduino/libraries/Braccio/src/Braccio.cpp:61: undefined reference to 'elbow'
/Users/marcofusco/Documents/Arduino/libraries/Braccio/src/Braccio.cpp:61: undefined reference to 'elbow'
/Users/marcofusco/Documents/Arduino/libraries/Braccio/src/Braccio.cpp:62: undefined reference to 'wrist_rot'
/Users/marcofusco/Documents/Arduino/libraries/Braccio/src/Braccio.cpp:62: undefined reference to 'wrist_rot'
/Users/marcofusco/Documents/Arduino/libraries/Braccio/src/Braccio.cpp:63: undefined reference to 'wrist_ver'
/Users/marcofusco/Documents/Arduino/libraries/Braccio/src/Braccio.cpp:63: undefined reference to 'wrist_ver'
/Users/marcofusco/Documents/Arduino/libraries/Braccio/src/Braccio.cpp:64: undefined reference to 'gripper'
/Users/marcofusco/Documents/Arduino/libraries/Braccio/src/Braccio.cpp:64: undefined reference to 'gripper'
/Users/marcofusco/Documents/Arduino/libraries/Braccio/src/Braccio.cpp:67: undefined reference to 'base'
/Users/marcofusco/Documents/Arduino/libraries/Braccio/src/Braccio.cpp:67: undefined reference to 'base'
/Users/marcofusco/Documents/Arduino/libraries/Braccio/src/Braccio.cpp:68: undefined reference to 'shoulder'
/Users/marcofusco/Documents/Arduino/libraries/Braccio/src/Braccio.cpp:68: undefined reference to 'shoulder'
/Users/marcofusco/Documents/Arduino/libraries/Braccio/src/Braccio.cpp:69: undefined reference to 'elbow'
/Users/marcofusco/Documents/Arduino/libraries/Braccio/src/Braccio.cpp:69: undefined reference to 'elbow'
/Users/marcofusco/Documents/Arduino/libraries/Braccio/src/Braccio.cpp:70: undefined reference to 'wrist_ver'
/Users/marcofusco/Documents/Arduino/libraries/Braccio/src/Braccio.cpp:70: undefined reference to 'wrist_ver'
/Users/marcofusco/Documents/Arduino/libraries/Braccio/src/Braccio.cpp:71: undefined reference to 'wrist_rot'
/Users/marcofusco/Documents/Arduino/libraries/Braccio/src/Braccio.cpp:71: undefined reference to 'wrist_rot'
/Users/marcofusco/Documents/Arduino/libraries/Braccio/src/Braccio.cpp:72: undefined reference to 'gripper'
/Users/marcofusco/Documents/Arduino/libraries/Braccio/src/Braccio.cpp:72: undefined reference to 'gripper'
collect2: error: ld returned 1 exit status
exit status 1
Compilation error: exit status 1
I tried uninstalling and re-installing the Braccio and Servo libraries but that did not work.
I found the sketch below which uploads, however the robot is completely unresponsive:
/*
simpleMovements.ino
This sketch simpleMovements shows how they move each servo motor of Braccio
Created on 18 Nov 2015
by Andrea Martino
This example is in the public domain.
*/
#include <Braccio.h>
#include <Servo.h>
Servo base;
Servo shoulder;
Servo elbow;
Servo wrist_rot;
Servo wrist_ver;
Servo gripper;
void setup() {
//Initialization functions and set up the initial position for Braccio
//All the servo motors will be positioned in the "safety" position:
//Base (M1):90 degrees
//Shoulder (M2): 45 degrees
//Elbow (M3): 180 degrees
//Wrist vertical (M4): 180 degrees
//Wrist rotation (M5): 90 degrees
//gripper (M6): 10 degrees
Braccio.begin();
Serial.begin(9600);
while (!Serial);
}
void loop() {
/*
Step Delay: a milliseconds delay between the movement of each servo. Allowed values from 10 to 30 msec.
M1=base degrees. Allowed values from 0 to 180 degrees
M2=shoulder degrees. Allowed values from 15 to 165 degrees
M3=elbow degrees. Allowed values from 0 to 180 degrees
M4=wrist vertical degrees. Allowed values from 0 to 180 degrees
M5=wrist rotation degrees. Allowed values from 0 to 180 degrees
M6=gripper degrees. Allowed values from 10 to 73 degrees. 10: the toungue is open, 73: the gripper is closed.
*/
//(step delay, M1, M2, M3, M4, M5, M6);
Braccio.ServoMovement(20, 0, 15, 180, 170, 0, 73);
//Wait 1 second
delay(1000);
Braccio.ServoMovement(20, 180, 165, 0, 0, 180, 10);
//Wait 1 second
delay(1000);
Serial.println("test");
}
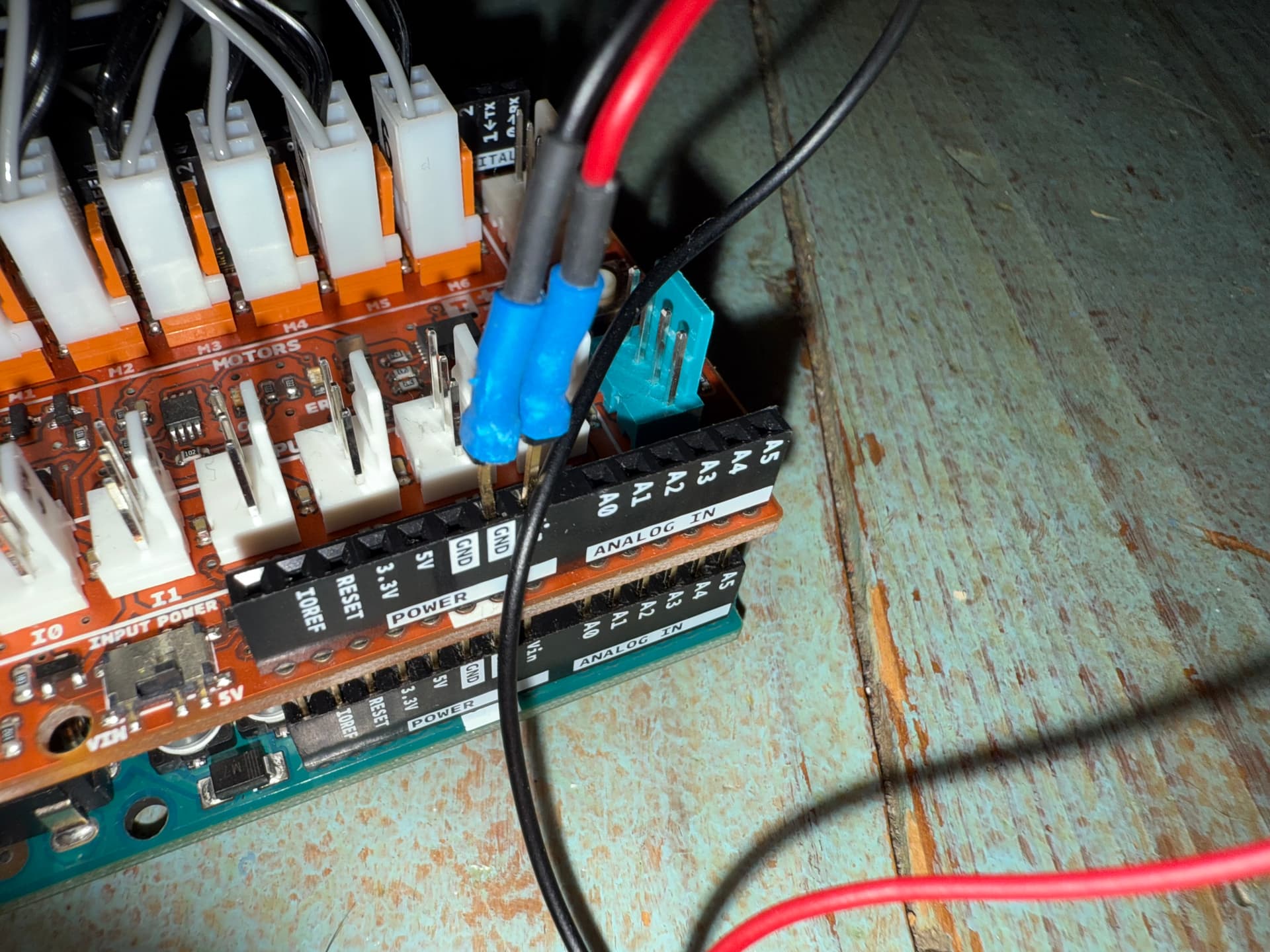
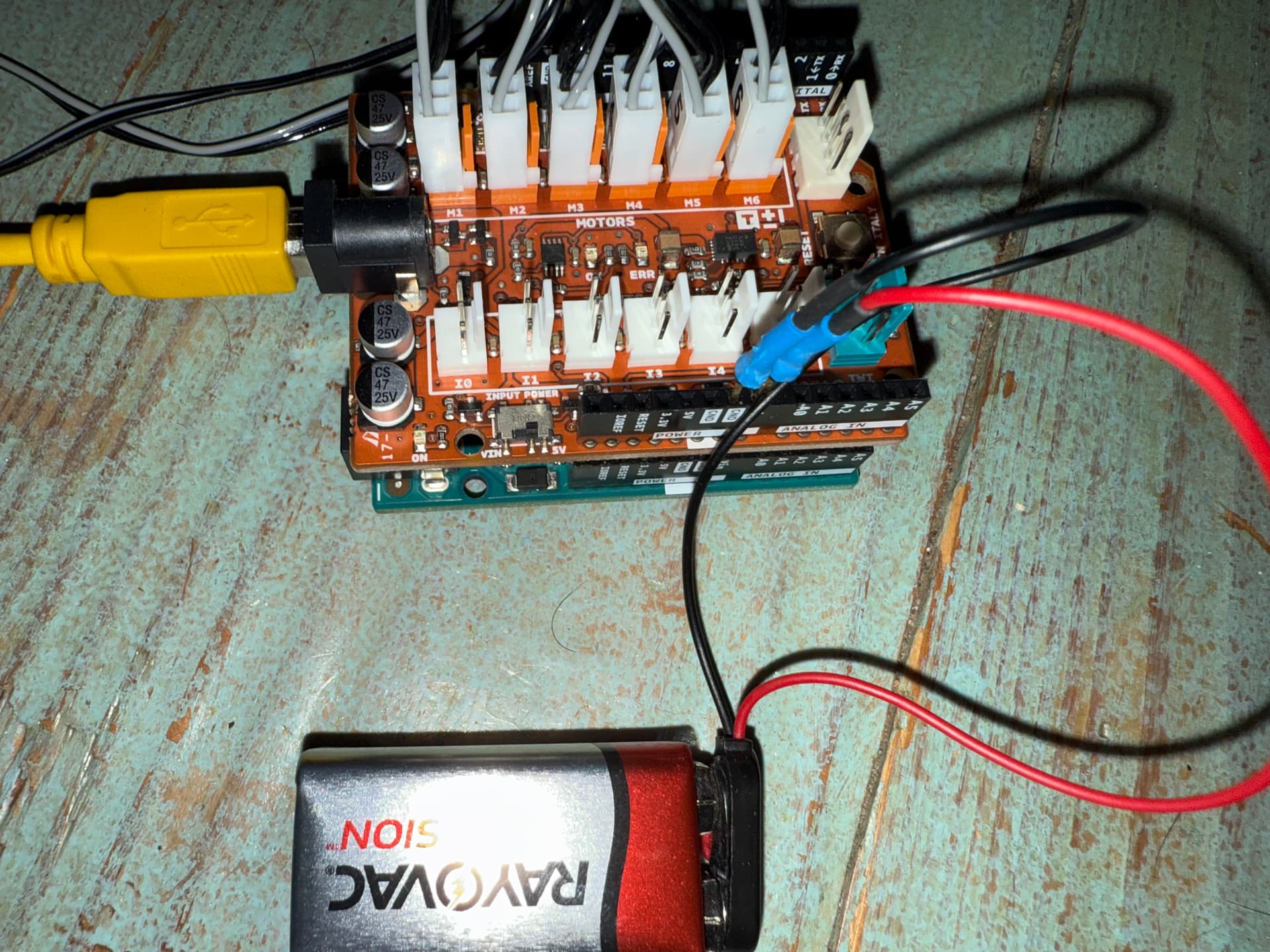
That battery can't supply high current, sufficient for motors.
If you want support here, post details about your devices/circuit. Some quick google research for "Tinkerkit Braccio" gives 5V5A supply...
When a 12V adapter is plugged into the Arduino shield a red LED with the label "error" is turned on. Is it possible I damaged the shield from not supplying enough current before?