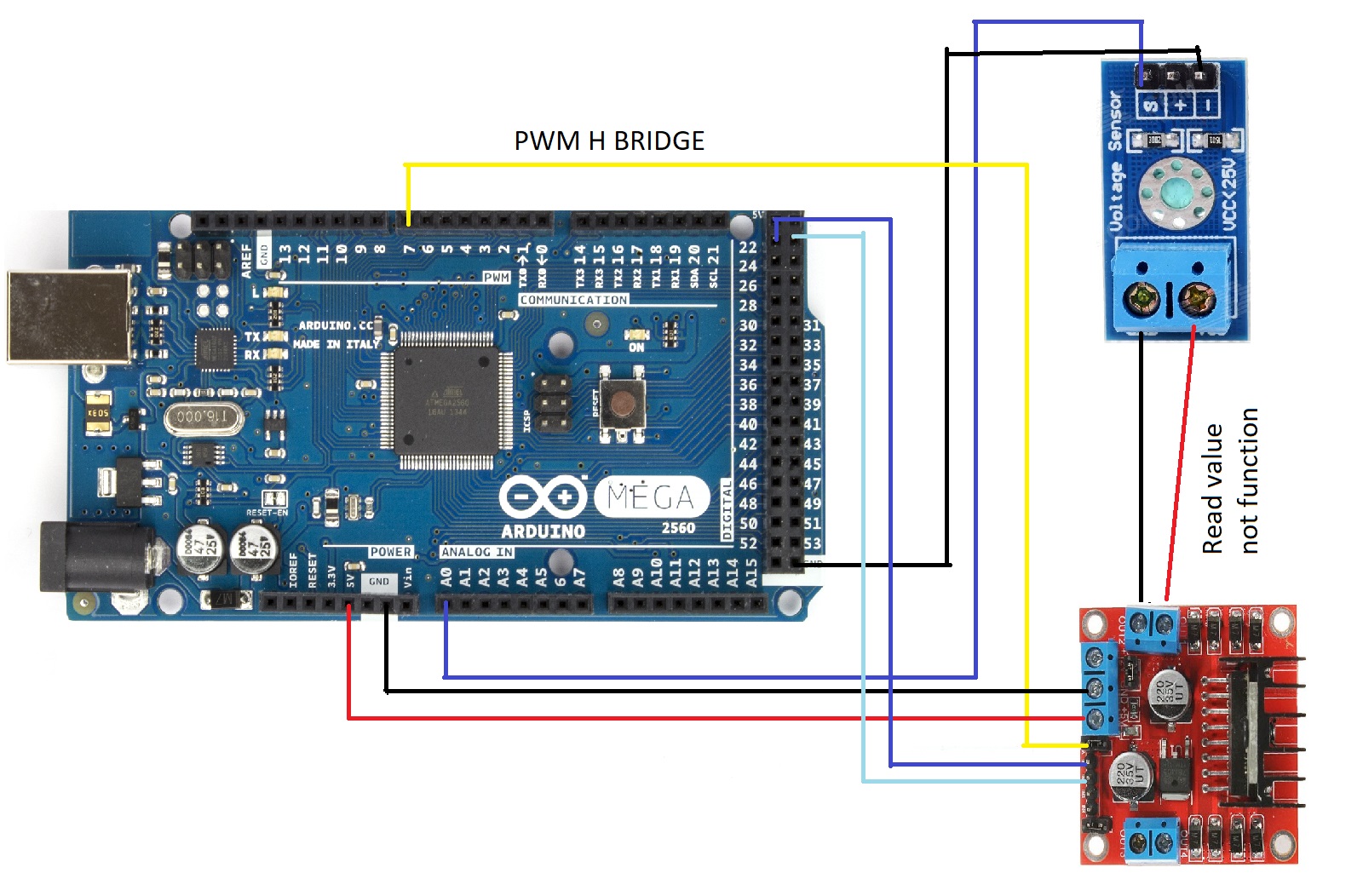
Well, that seems to eliminate the sensor ,so, somewhere in your code? 
#include <DallasTemperature.h>
#include <OneWire.h>
#include "Nextion.h"
#include <EEPROM.h>
#include <Wire.h>
#define ONE_WIRE_BUS 7
OneWire oneWire(ONE_WIRE_BUS);
DallasTemperature sensors(&oneWire);
//DeviceAddress sensor1;
NexNumber sensor_cell = NexNumber(0, 2, "n0");
NexNumber sensor_res = NexNumber(0, 6, "n1");
NexNumber sensor_adm = NexNumber(0, 7, "n2");
NexText txt_tensao_lambda = NexText(4, 7, "t0");
NexWaveform wave_temp_cell = NexWaveform(1, 2, "s0");
NexWaveform wave_snr_cell = NexWaveform(0, 5, "s0");
NexPage page5 = NexPage(5, 0, "page5");
NexPage page0 = NexPage(0, 0, "page0");
NexPage page4 = NexPage(4, 0, "page4");
NexGauge gauge_temp = NexGauge(0, 4, "z0");
NexText txt_temp_cell = NexText(0, 3, "t1");
NexText txt_temp_fio = NexText(0, 11, "t2");
NexNumber lambda = NexNumber(4, 2, "lambda");
NexVariable var_lambda = NexVariable(0, 10, "page0.var_lambda");
NexVariable var_ok = NexVariable(0, 11, "page0.var_ok");
const int analog_snr_hho=6; //porta analogica A0
const int analog_snr_res=1;
const int analog_snr_adm=2;
const int ptr_dgl_snr_hho_cell=22;
const int ptr_dgl_snr_hho_res=23;
const int ptr_dgl_snr_hho_adm=24;
const int analog_ptr_tensao_lambda=0;
char buffer_hsensor[10] = {0};
char buffer_tempcell[10] = {0};
char buffer_tempfio[10] = {0};
char buffer_tempadm[10] = {0};
char buffer_tensao_lambda[10] = {0};
int IN1 = 26;
int IN2 = 27;
int pwm=8;
int snr_hho_cell=0;
int snr_hho_res;
int snr_hho_adm;
int vlr_tensao_lambda;
float temp_cell;
float temp_fio;
float tensao_lambda;
//float R1 = 30000.0;
//float R2 = 7500.0;
//float vout;
uint32_t vlr_slr_pwm = 0;
int rele = 25;
int buzzer = 28;
uint32_t vlrfinal2 = 0;
uint32_t vlr_n0=0;
int end_vlr_lambda_eprom=0;
uint32_t vlr_var_lambda=0;
int ler_eprom;
void setup() {
Serial.begin(115200);
Serial1.begin(115200);
Serial2.begin(115200);
//sensors.begin();
pinMode(ptr_dgl_snr_hho_cell, INPUT);
pinMode(ptr_dgl_snr_hho_res, INPUT);
pinMode(ptr_dgl_snr_hho_adm, INPUT);
pinMode(rele, OUTPUT);
pinMode(buzzer, OUTPUT);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(pwm, OUTPUT);
//sensors.getAddress(sensor1, 0);
}
void loop()
{
noTone(buzzer);
//Serial.println(vlr_tensao_lambda);
// snr_hho_cell = analogRead(analog_snr_hho); //sensor de vazamento da celula ligado a porta A0
// snr_hho_res = analogRead(analog_snr_res); //sensor de vazamento do reservatorio ligado a porta A1
// snr_hho_adm = analogRead(analog_snr_adm); //sensor de vazamento da admissão ligado a porta A2
//memset(buffer_hsensor, 0, sizeof(buffer_hsensor));
// itoa(temp, buffer_hsensor, 10);
//hydrogen.setText(buffer_hsensor);
//sensor_cell.setValue(snr_hho_cell);
// sensor_res.setValue(snr_hho_res);
// sensor_adm.setValue(snr_hho_adm);
//sensors.requestTemperatures();
// temp_cell = sensors.getTempCByIndex(0);
// temp_fio = sensors.getTempCByIndex(1);
//tempx.setValue(temp_cell);
memset(buffer_tempfio, 0, sizeof(buffer_tempfio));
dtostrf(temp_fio,5,2, buffer_tempfio);
txt_temp_fio.setText(buffer_tempfio);
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH);
lambda.getValue(&vlr_n0);
vlrfinal2 = map(vlr_n0, 0, 100, 0, 255);
var_lambda.getValue(&vlr_var_lambda);
ler_eprom = EEPROM.read(end_vlr_lambda_eprom);
if (vlr_n0==0)
{
lambda.setValue(ler_eprom);
var_lambda.setValue(ler_eprom);
analogWrite(pwm, ler_eprom);
}
else
{
EEPROM.write(end_vlr_lambda_eprom, vlr_n0);
analogWrite(pwm, ler_eprom);
}
if (snr_hho_cell >= 200)
{
page5.show();
digitalWrite(rele, HIGH);
tone(buzzer, 200);
digitalWrite(buzzer, HIGH);
delay(500);
digitalWrite(buzzer, LOW);
//analogWrite(AOUTpin, 0);
}
if (temp_cell >= 40.00)
{
page5.show();
digitalWrite(rele, HIGH);
tone(buzzer, 200);
digitalWrite(buzzer, HIGH);
delay(500);
digitalWrite(buzzer, LOW);
}
//wave_temp_cell.addValue(0,snr_hho_cell);
//wave_snr_cell.addValue(0,snr_hho_cell);
//gauge_temp.setValue(map(temp_cell, 0,180,0,360));
memset(buffer_tempcell, 0, sizeof(buffer_tempcell));
dtostrf(temp_cell,5,2, buffer_tempcell);
txt_temp_cell.setText(buffer_tempcell);
//delay(100);
vlr_tensao_lambda = analogRead(A0); //port of sensor votage
tensao_lambda=((vlr_tensao_lambda*0.00489)*5); //float to convert A0 result
memset(buffer_tensao_lambda, 0, sizeof(buffer_tensao_lambda));
dtostrf(tensao_lambda,5,2, buffer_tensao_lambda);
txt_tensao_lambda.setText(buffer_tensao_lambda);
Serial.println(buffer_tensao_lambda);
}