Hi,
I have written a code that moves an actuator back and fourth to defined positions for 60 cycles. The linear actuator has a built in potentiometer.
The process is:
-waits for user input of "1" to start code
-starts at 0 position 0
-extends to position 2
-pauses for two seconds
-retracts to 0 position
-pauses for two seconds
-repeats 60 times.
For reference, I have a linear actuator with built in potentiometer.
I have an Arduino Uno, and H Bridge. .
const int enablepin=13; //Set the Enable jumper to D13 (Megamoto Shield to arduino)variable, digital pin
const int PWMA = 11; // Set PWMA to pin 11, Actuator connnects here, digital pin
const int PWMB = 3;//Set PWMB to pin 3, Actuator connects here, digital pin
const int PotPin =1; //Sets the input pin [1] for the potentiometer, Analog pin
int cyclecount=0; //counts how many cycles have been completed
int pausetimeext = 2*1000; //5 seconds, times 1000 to convert to milliseconds
int pausetimeret = 2*1000; //5 seconds, times 1000 to convert to milliseconds
int currentposition =0; // Defines current position
int position0 =1; // Analog input range of 0 to 1023
int position2= 171.5; // Analog input range of 0 to 1023 (1.5 inch??)
int startvar = 0; // variable to be assigned to start program via serial monitor
char rx_byte =0;
void MoveTo(int position){
if(position < 0 || position > 170.5)
return; // ignore out of range values
if(analogRead(PotPin)<position){
//extend code
Serial.println ("Extending"); // Prints message
Serial.print ("Cycle Count: "); // Prints message
Serial.println (cyclecount); // Prints message
digitalWrite (PWMA, LOW); //Set PWMA to activate low
digitalWrite(PWMB, HIGH); //Set PWMB to activate high
digitalWrite(enablepin,HIGH); //Enable the motor. Actuator should begin to extend
while (analogRead(PotPin)<position){/* JUST WAITING*/}
stopActuator (); //disable motor
}
else if (analogRead(PotPin)<position) {
//retract code
Serial.println ("Retracting"); // Prints message
Serial.print ("Current Position ");
Serial.print (analogRead(PotPin));
digitalWrite(PWMA,HIGH); //Set PWMA to activate high
digitalWrite(PWMB, LOW); //Set PWMB to activate low
Serial.println ("2"); // Prints message
digitalWrite (enablepin, HIGH); // ENable the motor, actuator should begin to retract
Serial.println ("3"); // Prints message
cyclecount=cyclecount+1; // Add one to cycle count
while(analogRead(PotPin)>position) {/* JUST WAITING*/}
stopActuator (); //disable motor
}
}
void setup() {
Serial.begin(9600); //start serial connection
pinMode (enablepin,OUTPUT); //Enable the board, sets output
pinMode (PWMA, OUTPUT); //Set Motor Ouputs
pinMode (PWMB, OUTPUT); //Set Motor Ouputs
pinMode (PotPin, INPUT); //sets potentiometer sensor as an input, feedback from actuator
digitalWrite (PWMA, LOW); //Presets the outputs to low
digitalWrite (PWMB, LOW); //Presets the outputs to low
cyclecount=0; // Set Cycle Counter to 0 before test starts
// Repeat 60 times
}
void loop() {
//main code here, to run repeatedly:
if ( Serial.available ()>0) { //See if input avalible
rx_byte = Serial.read(); // retrieves input character provided by user
if((rx_byte > '0')&& (rx_byte < '2')) { //Checks if input recieved to start. 1 is required entry
Serial.println ("Input Recieved, Starting"); // singals program is starting, commence loop
Serial.print ("Current Position ");
Serial.print (analogRead(PotPin));
for (int i =0; i < 60; i++) {
MoveTo(position2);
delay(pausetimeext);
MoveTo(position0);
delay(pausetimeret);
}
}
}
}
void stopActuator () {
digitalWrite (PWMA, LOW); //Set PWMA to activate low
digitalWrite(PWMB, LOW); //Set PWMB to activate low
}
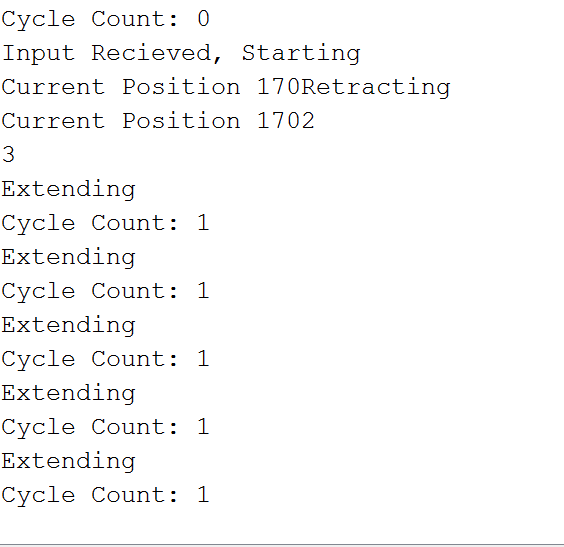
The code starts to extend, but does not retract. It appears to enter an endless loop, with the display output being "extracting" continuously. I have attached a screenshot.
What is wrong and how can I fix this?
THANK YOU!!
Actuator_Position_Control_Rev_C.ino (3.31 KB)