Well, I can do all that, but first I would like to annouce that I didn't know that I should solder the board, meaning nothing worked.
Right now, the ADXL345 is working, with a lot of noise though, and the LLC is working properly(which, at a second thought, has nothing to do with this post actually..)!
The code looks a little complexed right now, for I have merged the readings from the HR-SC04 with the ADXL.
//Add the SPI library so we can communicate with the ADXL345 sensor
#include <SPI.h>
#include <MeetAndroid.h>
#define trigPin 8
#define echoPin 7
//Assign the Chip Select signal to pin 10.
int CS=10;
//This is a list of some of the registers available on the ADXL345.
//To learn more about these and the rest of the registers on the ADXL345, read the datasheet!
char POWER_CTL = 0x2D; //Power Control Register
char DATA_FORMAT = 0x31;
char DATAX0 = 0x32; //X-Axis Data 0
char DATAX1 = 0x33; //X-Axis Data 1
char DATAY0 = 0x34; //Y-Axis Data 0
char DATAY1 = 0x35; //Y-Axis Data 1
char DATAZ0 = 0x36; //Z-Axis Data 0
char DATAZ1 = 0x37; //Z-Axis Data 1
//This buffer will hold values read from the ADXL345 registers.
unsigned char values[10];
//These variables will be used to hold the x,y and z axis accelerometer values.
int x,y,z;
/*
Sends sensor data to Android
(needs SensorGraph and Amarino app installed and running on Android)
*/
MeetAndroid meetAndroid;
long duration;
float cmPerMS,distance;
void setup(){
//------------------- Distance Sensor Begins --------------
Serial.begin (9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
cmPerMS = 1/0.034029;
//-------------------- Distance Sensor Ends -----------------
//-------------------- Angle Sensor Begins -------------------
//Initiate an SPI communication instance.
SPI.begin();
//Configure the SPI connection for the ADXL345.
SPI.setDataMode(SPI_MODE3);
//Create a serial connection to display the data on the terminal.
// Serial.begin(9600);
//Set up the Chip Select pin to be an output from the Arduino.
pinMode(CS, OUTPUT);
//Before communication starts, the Chip Select pin needs to be set high.
digitalWrite(CS, HIGH);
//Put the ADXL345 into +/- 4G range by writing the value 0x01 to the DATA_FORMAT register.
writeRegister(DATA_FORMAT, 0x01);
//Put the ADXL345 into Measurement Mode by writing 0x08 to the POWER_CTL register.
writeRegister(POWER_CTL, 0x08); //Measurement mode
//-------------------- Angle Sensor Ends ---------------------
}
void loop(){
//------------------- Distance Sensor Begins --------------
meetAndroid.receive();
digitalWrite(trigPin, LOW); // Added this line
delayMicroseconds(2); // Added this line
digitalWrite(trigPin, HIGH);
// delayMicroseconds(1000); - Removed this line
delayMicroseconds(10); // Added this line
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = (duration/2) /cmPerMS;
meetAndroid.send(distance);
//-------------------- Distance Sensor Ends -----------------
//-------------------- Angle Sensor Begins -------------------
//Reading 6 bytes of data starting at register DATAX0 will retrieve the x,y and z acceleration values from the ADXL345.
//The results of the read operation will get stored to the values[] buffer.
readRegister(DATAX0, 6, values);
//The ADXL345 gives 10-bit acceleration values, but they are stored as bytes (8-bits). To get the full value, two bytes must be combined for each axis.
//The X value is stored in values[0] and values[1].
x = ((int)values[1]<<8)|(int)values[0];
//The Y value is stored in values[2] and values[3].
y = ((int)values[3]<<8)|(int)values[2];
//The Z value is stored in values[4] and values[5].
z = ((int)values[5]<<8)|(int)values[4];
//Print the results to the terminal.
Serial.print(x, DEC);
Serial.print(',');
Serial.print(y, DEC);
Serial.print(',');
Serial.println(z, DEC);
delay(200);
//-------------------- Angle Sensor Ends ---------------------
}
//This function will write a value to a register on the ADXL345.
//Parameters:
// char registerAddress - The register to write a value to
// char value - The value to be written to the specified register.
void writeRegister(char registerAddress, char value){
//Set Chip Select pin low to signal the beginning of an SPI packet.
digitalWrite(CS, LOW);
//Transfer the register address over SPI.
SPI.transfer(registerAddress);
//Transfer the desired register value over SPI.
SPI.transfer(value);
//Set the Chip Select pin high to signal the end of an SPI packet.
digitalWrite(CS, HIGH);
}
//This function will read a certain number of registers starting from a specified address and store their values in a buffer.
//Parameters:
// char registerAddress - The register addresse to start the read sequence from.
// int numBytes - The number of registers that should be read.
// char * values - A pointer to a buffer where the results of the operation should be stored.
void readRegister(char registerAddress, int numBytes, unsigned char * values){
//Since we're performing a read operation, the most significant bit of the register address should be set.
char address = 0x80 | registerAddress;
//If we're doing a multi-byte read, bit 6 needs to be set as well.
if(numBytes > 1)address = address | 0x40;
//Set the Chip select pin low to start an SPI packet.
digitalWrite(CS, LOW);
//Transfer the starting register address that needs to be read.
SPI.transfer(address);
//Continue to read registers until we've read the number specified, storing the results to the input buffer.
for(int i=0; i<numBytes; i++){
values = SPI.transfer(0x00);
- }*
- //Set the Chips Select pin high to end the SPI packet.*
- digitalWrite(CS, HIGH);*
}
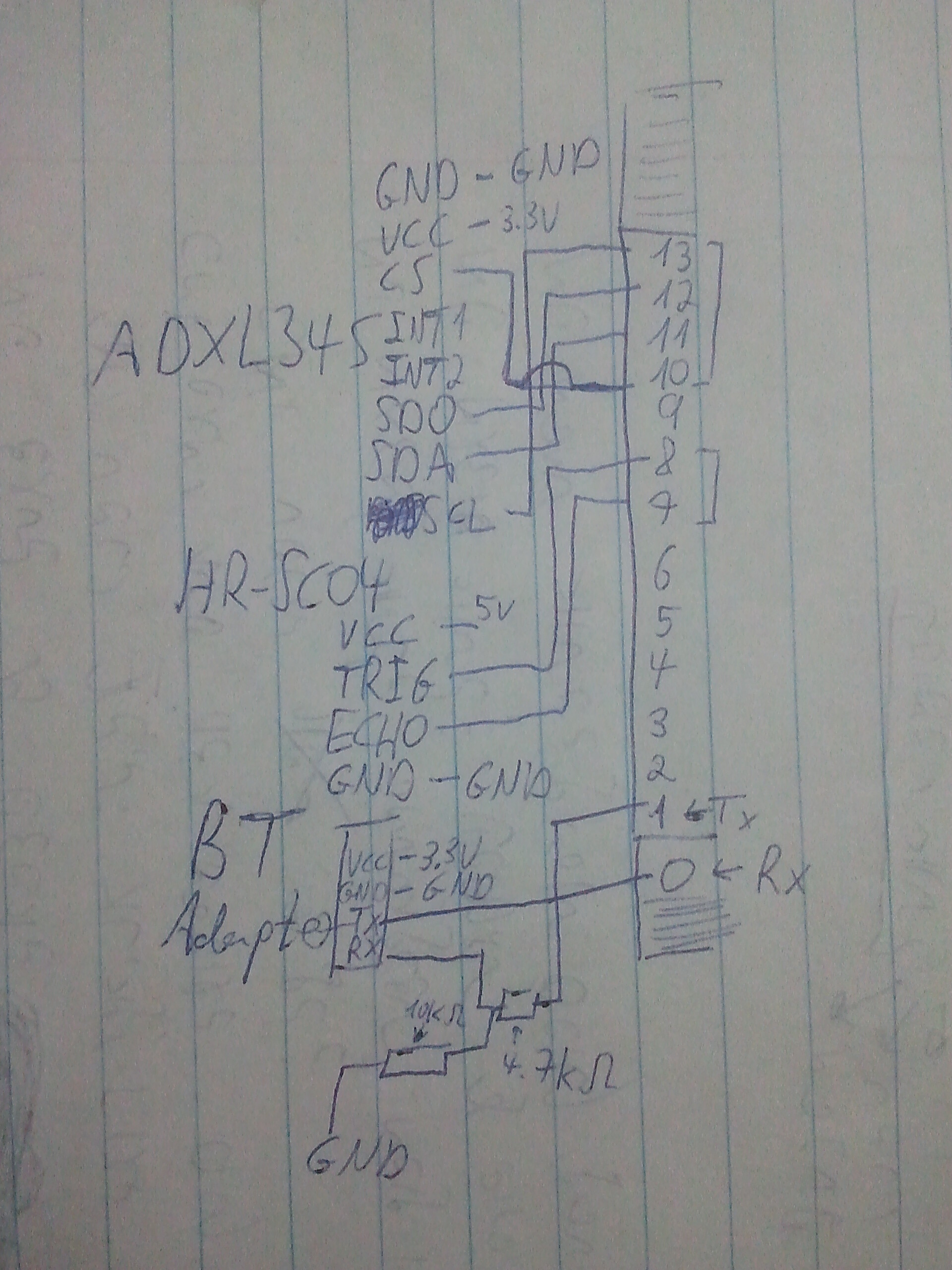
The wiring is really too basic to draw a circuit for, but I don't mind to post it if that's neccesary.. As I have read in the tutorial, those 10-13 digital pins are also used for the SPI connection, so I believe the wiring is ok. I would appreciate any help with all the false readings, which can sometimes remain constant for a second or two(not for all the axis's at once), and with the Z axis, which does not seem to have any logical outputs at all..
example output:
Distance - angles
29.98-86,-1,-16
29.98-83,-97,-4
29.98-18942,-129,-16
29.98-18942,-225,-64
29.98-20734,-1,-16
30.12-20734,-1,-16
29.98-20734,-1,-16
29.98-83,-121,-16
29.98-83,-97,-4
29.98-23038,-129,-16
30.49-86,-1,-16
29.98-20734,-1,-16
29.98-86,-1,-16