buon primo maggio a tutti!
in questi giorni ho un problema di questo tipo, ho comprato un encoder da robotstoe (questo: http://www.robotstore.it/product/501/Encoder-Rotativo-Illuminato-con-LED-RGB.html ) e usando qualsiasi sketch di esempio e librerie varie trovate in rete non riesco ad avere il risultato desiderato ovvero ad ogni scatto aumentare il valore dell encoder di uno step (ora come ora me ne dà 4 ogni scatto).
Molto probabilmente il motivo è che seppur avendo letto qualsiasi cosa sul codice gray non ho neancora capito come funziona .
in realtà un modo lo avevo trovato ovvero far stampare sulla seriale il valore dell encoder diviso 4 ; se qualcuno con un buon cuore mi spiega come modificare il codice per far leggere ad ogni scatto poi vi spiegherò i problemi successivi :~
in allegato lo sketch che funziona meglio di tutti:
#include <Encoder.h>
//From bildr article: http://bildr.org/2012/08/rotary-encoder-arduino/
//these pins can not be changed 2/3 are special pins
int encoderPin1 = 2;
int encoderPin2 = 3;
volatile int lastEncoded = 0;
volatile long encoderValue = 0;
long lastencoderValue = 0;
int lastMSB = 0;
int lastLSB = 0;
void setup() {
Serial.begin (9600);
pinMode(encoderPin1, INPUT);
pinMode(encoderPin2, INPUT);
digitalWrite(encoderPin1, HIGH); //turn pullup resistor on
digitalWrite(encoderPin2, HIGH); //turn pullup resistor on
//call updateEncoder() when any high/low changed seen
//on interrupt 0 (pin 2), or interrupt 1 (pin 3)
attachInterrupt(0, updateEncoder, CHANGE);
attachInterrupt(1, updateEncoder, CHANGE);
}
void loop(){
//Do stuff here
Serial.println(encoderValue/4);
delay(100); //just here to slow down the output, and show it will work even during a delay
}
void updateEncoder(){
int MSB = digitalRead(encoderPin1); //MSB = most significant bit
int LSB = digitalRead(encoderPin2); //LSB = least significant bit
int encoded = (MSB << 1) |LSB; //converting the 2 pin value to single number
int sum = (lastEncoded << 2) | encoded; //adding it to the previous encoded value
if(sum == 0b1101 || sum == 0b0100 || sum == 0b0010 || sum == 0b1011) encoderValue ++;
if(sum == 0b1110 || sum == 0b0111 || sum == 0b0001 || sum == 0b1000) encoderValue --;
lastEncoded = encoded; //store this value for next time
}
in particolare non capisco il pezzo di codice seguente , soppratutto le 2 righe di incremento o decremento nonostante abbia provato a modificarle
void updateEncoder(){
int MSB = digitalRead(encoderPin1); //MSB = most significant bit
int LSB = digitalRead(encoderPin2); //LSB = least significant bit
int encoded = (MSB << 1) |LSB; //converting the 2 pin value to single number
int sum = (lastEncoded << 2) | encoded; //adding it to the previous encoded value
if(sum == 0b1101 || sum == 0b0100 || sum == 0b0010 || sum == 0b1011) encoderValue ++;
if(sum == 0b1110 || sum == 0b0111 || sum == 0b0001 || sum == 0b1000) encoderValue --;
lastEncoded = encoded; //store this value for next time
}
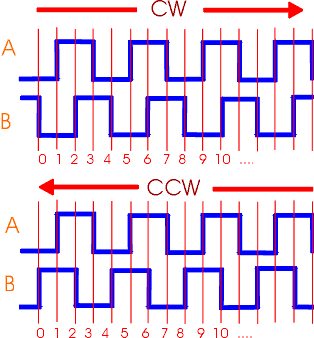
Il codice Gray é un codice binario usato per encoder assoluti che ha la particolaritá che a ogni passo cambia solo 1 bit. Questo ha il vantaggio che se il lettore del codice non é allineato perfettamente non crea problemi. Questo succederebbe se usi un codice binari normale dove per esempio nel passaggio da 7 a 8 cambiano tutti i 4 bit. Un codice assoluto é un codice che legge la posizione in ogni momento e non i passi da un punto di riferimento.
leggendo questo topic incominciavo a credere che il problema fosse il rimbalzo.. (http://arduino.cc/forum/index.php?topic=129872.0)
la libreria rotaryencoder l ho già provata ora rifaccio una prova, ma nel mio sketch per risolvere basterebbe che cambiassi il pezzo di codice che incrementa e decrementa?(quello dove cè il sum=)
comunque ora incomincio ad avere le idde un po chiare wikipedia non era abbastanza =(
quindi per leggere un solo incremento ogni scatto dovrei rifare le due righe xor così giusto?
if(sum == 0b00 || sum == 0b01) encoderValue ++;
if(sum == 0b11 || sum == 0b10) encoderValue --;
aggiornamento:
ho provato ma la situazione peggiora... con tutte le combinazioni. @uwe ho provato con la libreria suggerita ma non funge neancora , mi da valori +1 o -1 a seconda del verso di rotazione e ogni scatto mi scrive 4 volte il +1 o -1 ma non sempre correttamente ogni qualche scatto mi scrive:
Se può esserti d'aiuto questo è lo sketch che ho fatto tempo fà per provare degli encoder Bourns da 256 impulsi/giro.
Praticamente ho collegato il canale A all'interrupt 0, che chiama la funzione encoder che legge lo stato del canale B per discriminare la direzione.
Nel loop aggiorno il display.
purtroppo ho l arduino bloccato... io devo usare l edncoder per navigare in un menu di case e avendole provate tutte ho bisogno che ogni scatto sia un incremento e non riesco a capire il perchè me ne legga 4...
niente credo mi arrenderò le ho provate tutte... a quanto pare ogni scatto ci sono le 4 combinazioni sia di incremento che di decremento in codice gray(dentro l encoder) =(
@ gingardu non non è un problema di serial print perchè con altri codici mi stampa tutti i valori (1,2,3,4,5,6,7,8,9,10,11,12) e quando l encoder scatta si ferma al 4 8 12 etc....
@barzezuan si ho letto tutti i post ma credo che il modo di leggere un solo impulso a scatto non esista dal momento che ogni scsatto internamente ha 4 intervalli
aspi: @barzezuan si ho letto tutti i post ma credo che il modo di leggere un solo impulso a scatto non esista dal momento che ogni scsatto internamente ha 4 intervalli
Secondo il datasheet non è come dici tu, ma come ti ha scritto uwefed. Allora, SENZA NESSUNA LIBRERIA (che legge i fronti di salita e discesa di entrambi i canali) prova a leggere un canale per volta e vedi cosa ti esce.