Hi!
I am using 2 submergible 3-6V water pumps.
When the pumps are actioned, after a short while the Arduino freezes.
I tried to put 0.1uF ceramic capacitors between the motor leads and between each power lead and GND, but I can't say I saw much improvement. I also tried putting electrolytic capacitors almost everywhere in hope of filtering some of the noise induced by the pumps in the circuit, but no success.
I tried powering separately the logic circuit with a 9V battery and use the LI-ION pack only for the motors, but no difference.
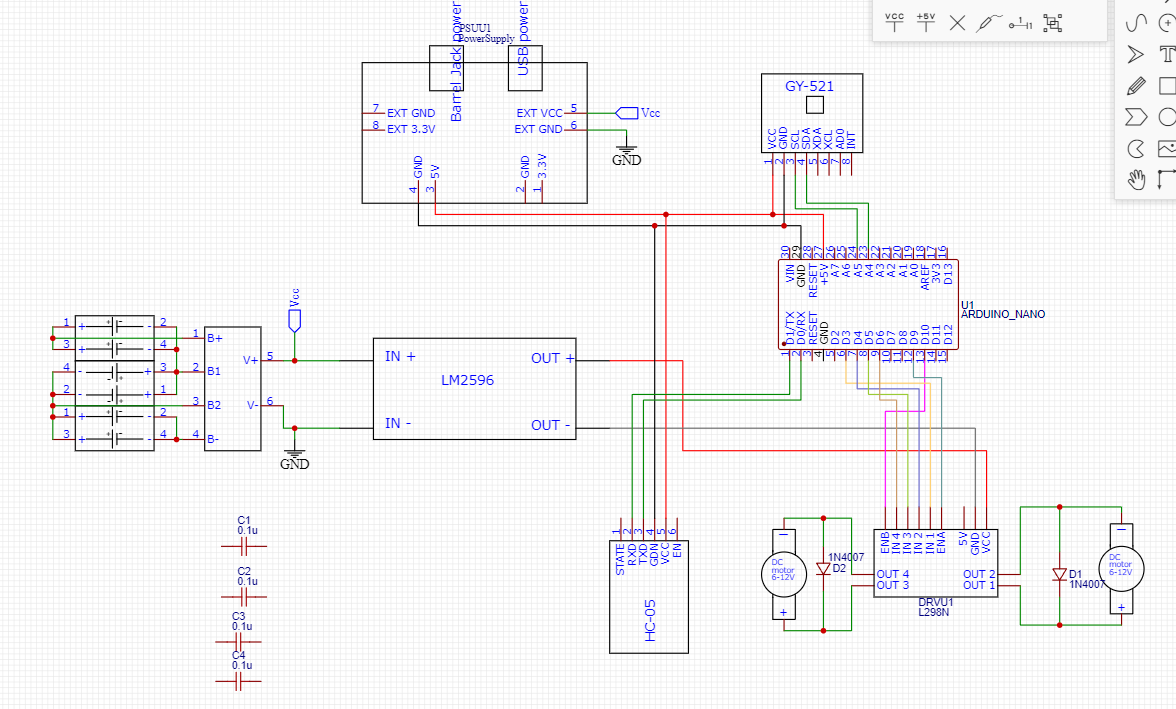
Here is the circuit. I also uploaded the code I'm using for testing the basic functionality.
#include <Wire.h>
#include <Arduino.h>
#define MPU6050_ADDR 0x68
// Definirea pinilor pentru L298N
#define MotorA_Enable 9 // Pinul PWM pentru controlul vitezei Motorului A
#define MotorA_Directie1 3 // Pinii de directie pentru Motorul A
#define MotorA_Directie2 4
#define MotorB_Enable 10 // Pinul PWM pentru controlul vitezei Motorului B
#define MotorB_Directie1 5 // Pinii de directie pentru Motorul B
#define MotorB_Directie2 6
void setup() {
Wire.begin();
Wire.beginTransmission(MPU6050_ADDR);
Wire.write(0x6B);
Wire.write(0x00);
Wire.endTransmission(true);
Serial.begin(115200);
// Initializarea pinilor de control pentru L298N
pinMode(MotorA_Enable, OUTPUT);
pinMode(MotorA_Directie1, OUTPUT);
pinMode(MotorA_Directie2, OUTPUT);
pinMode(MotorB_Enable, OUTPUT);
pinMode(MotorB_Directie1, OUTPUT);
pinMode(MotorB_Directie2, OUTPUT);
}
void loop() {
double angle = readGyroAngle();
// Controlul Motorului A
if (angle > 1.0) {
digitalWrite(MotorA_Directie1, HIGH);
digitalWrite(MotorA_Directie2, LOW);
analogWrite(MotorA_Enable, 180); // Viteza medie
} else {
analogWrite(MotorA_Enable, 0); // Oprire Motorul A
}
// Controlul Motorului B
if (angle < -1.0) {
digitalWrite(MotorB_Directie1, HIGH);
digitalWrite(MotorB_Directie2, LOW);
analogWrite(MotorB_Enable, 180); // Viteza medie
} else {
analogWrite(MotorB_Enable, 0); // Oprire Motorul B
}
Serial.print("Angle: ");
Serial.print(angle);
Serial.println();
delay(20);
}
double readGyroAngle() {
Wire.beginTransmission(MPU6050_ADDR);
Wire.write(0x3B);
Wire.endTransmission(false);
Wire.requestFrom(MPU6050_ADDR, 6, true);
int16_t AccelX, AccelY, AccelZ;
AccelX = Wire.read() << 8 | Wire.read();
AccelY = Wire.read() << 8 | Wire.read();
AccelZ = Wire.read() << 8 | Wire.read();
double angle = atan2(AccelY, AccelZ) * 180 / PI;
return angle;
}