Bonsoir,
Réponse à @Charles_9999
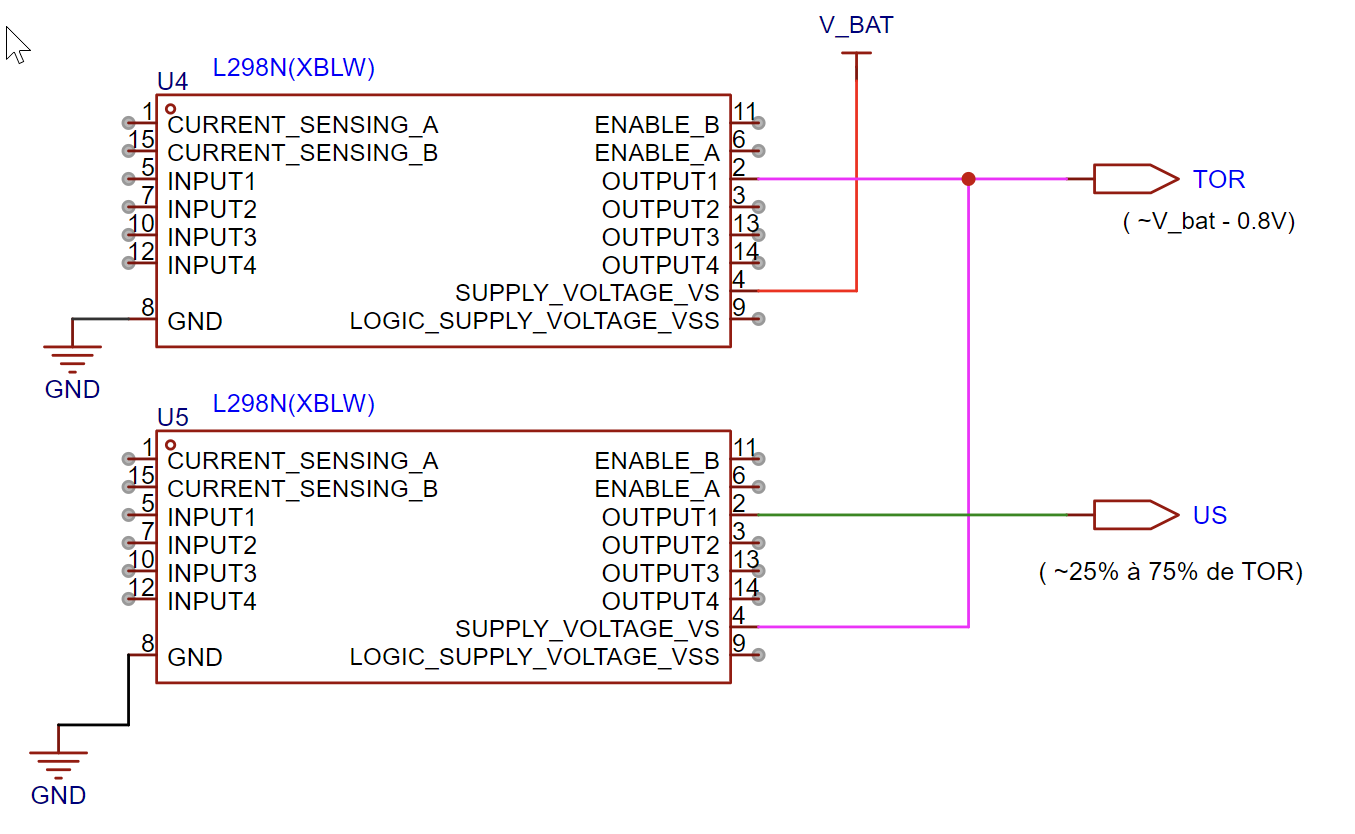
Perso, je vais me centrer sur ce qui est disponible, donc je laisse de côté le BTS7960.
Mes mesures, je les ais faites en DC partant du principe que mon voltmétre donnait une valeur moyenne.
J'ai ensuite entré ces valeurs dans un tableur, calculé des %, et confié à mon tableur le soin de tracer les courbes en "lignes" (entre les points de mesures).
Possible donc que des fois cela frôle voir dépasse les 100%.
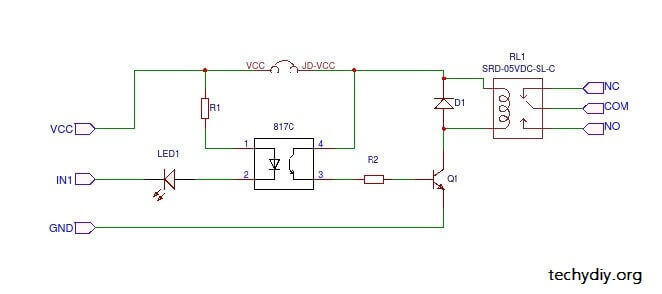
Ton idée d'utiliser un L298 comme un interrupteur TOR, moi je ne suis pas chaud pour des raisons de physique des composants.
Mode  : Il paraît que j'explique bien, mais que tout le monde ne comprend pas toujours:thinking:
: Il paraît que j'explique bien, mais que tout le monde ne comprend pas toujours:thinking:
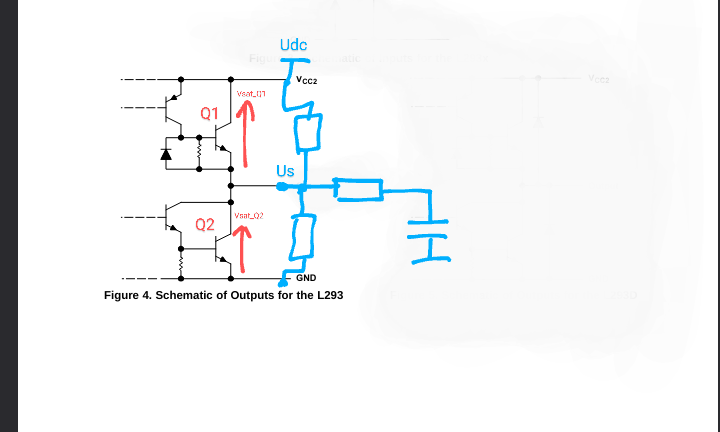
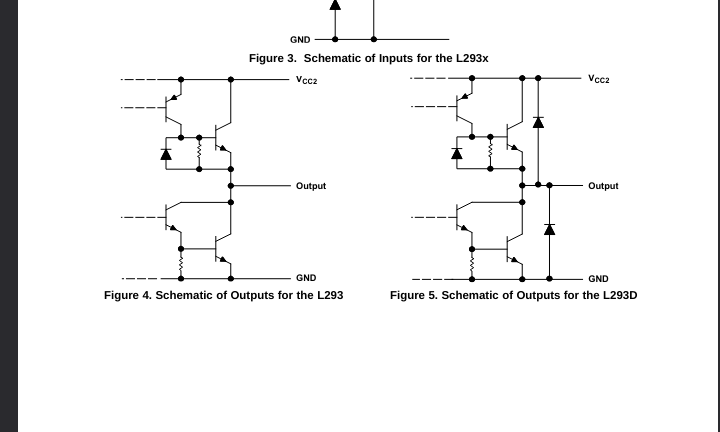
La tension Vce aux bornes d'un transistor varie tout de même en fonction du courant Ic (ou Ie) qui le traverse, et si le transistor est saturé ou non.
Disons, pour faire simple, que plus le courant Ic ou Ie est grand, moins le transistor est saturé, plus Vce est grand.
Et alors?
Alors sur Us, on a une charge fixe et elevée, donc Ic est faible (mA), donc Vce négligeable = peu de chute de tension
Mais sur Udc, on a une charge variable (l'électrovanne) qui consomme +/- du courant de 0 à (je présume) 750mA, ça varie, et comme le courant est parfois elevé, la chute de tension n'est pas constante, c'est donc, je l'estime, un trés mauvais Tout Ou Rien.
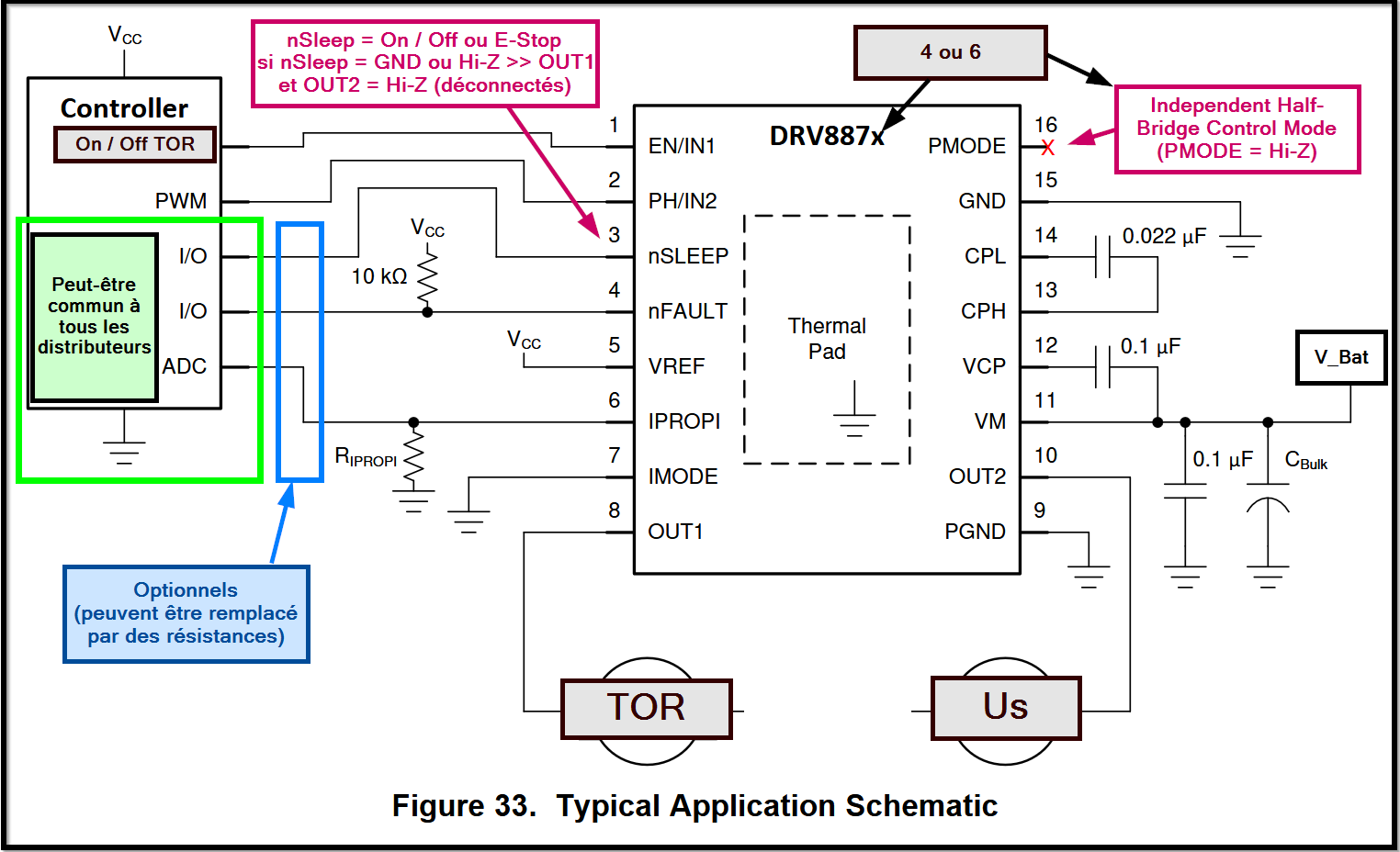
Je ne trouve très clean de partir de cette façon avec un TOR.
Je préfère je relais ou le MOS canal P.
Dans les 2 cas, il faut prévoir une adaptation pour que cela marche en 12V ou 24V.
Aprés il y a le pb de l'alternateur, à Re Regarder, je n'y ais pas vraiment preté attention!






{kind=link}