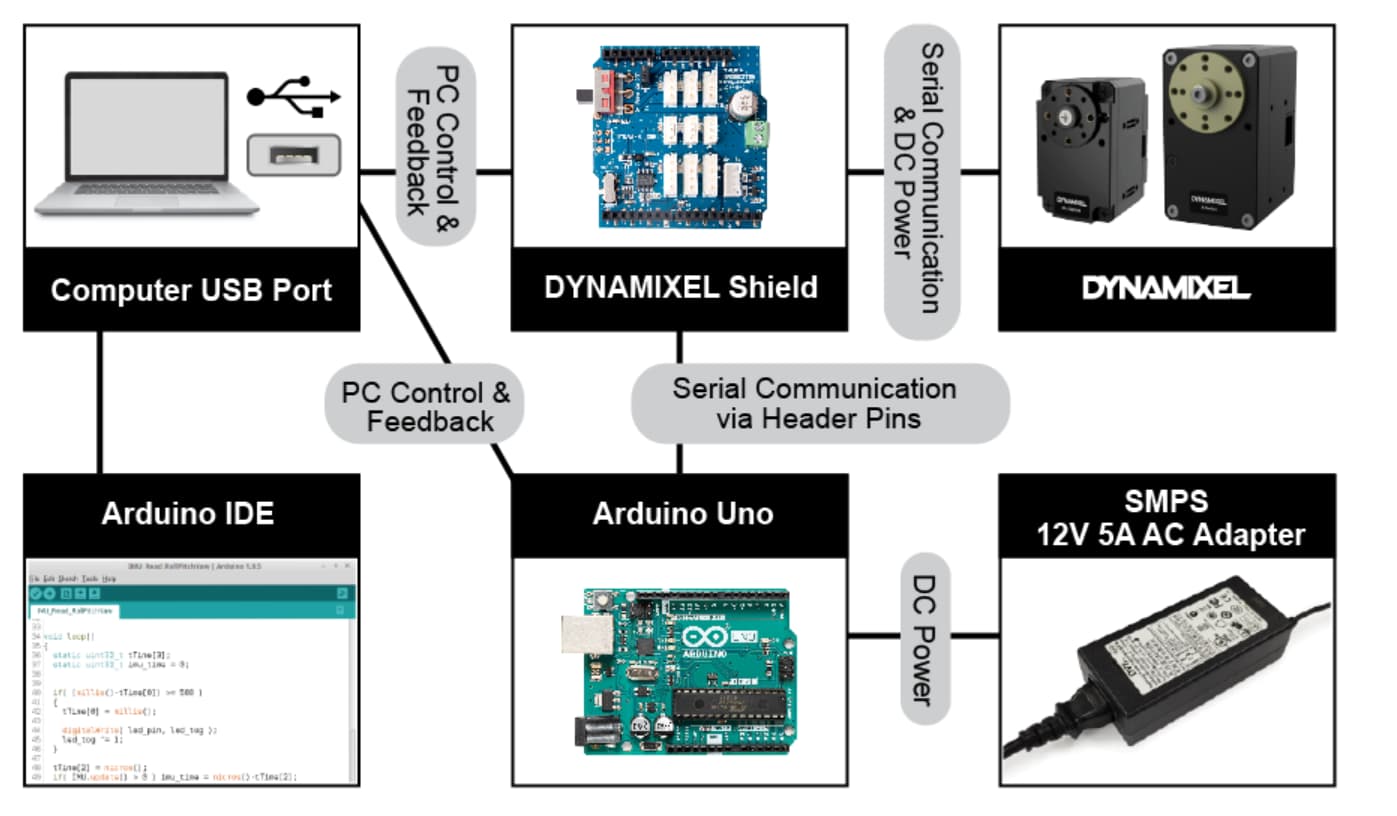
Hello, I am using an Arduino Uno with a Dynamixel Shield to control a Dynamixel XM430-W350-R Servomotor. Whenever I try to run the following code from the DynamixelShield
Library.
/*******************************************************************************
* Copyright 2016 ROBOTIS CO., LTD.
*
* Licensed under the Apache License, Version 2.0 (the "License");
* you may not use this file except in compliance with the License.
* You may obtain a copy of the License at
*
* http://www.apache.org/licenses/LICENSE-2.0
*
* Unless required by applicable law or agreed to in writing, software
* distributed under the License is distributed on an "AS IS" BASIS,
* WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
* See the License for the specific language governing permissions and
* limitations under the License.
*******************************************************************************/
#include <DynamixelShield.h>
#if defined(ARDUINO_AVR_UNO) || defined(ARDUINO_AVR_MEGA2560)
#include <SoftwareSerial.h>
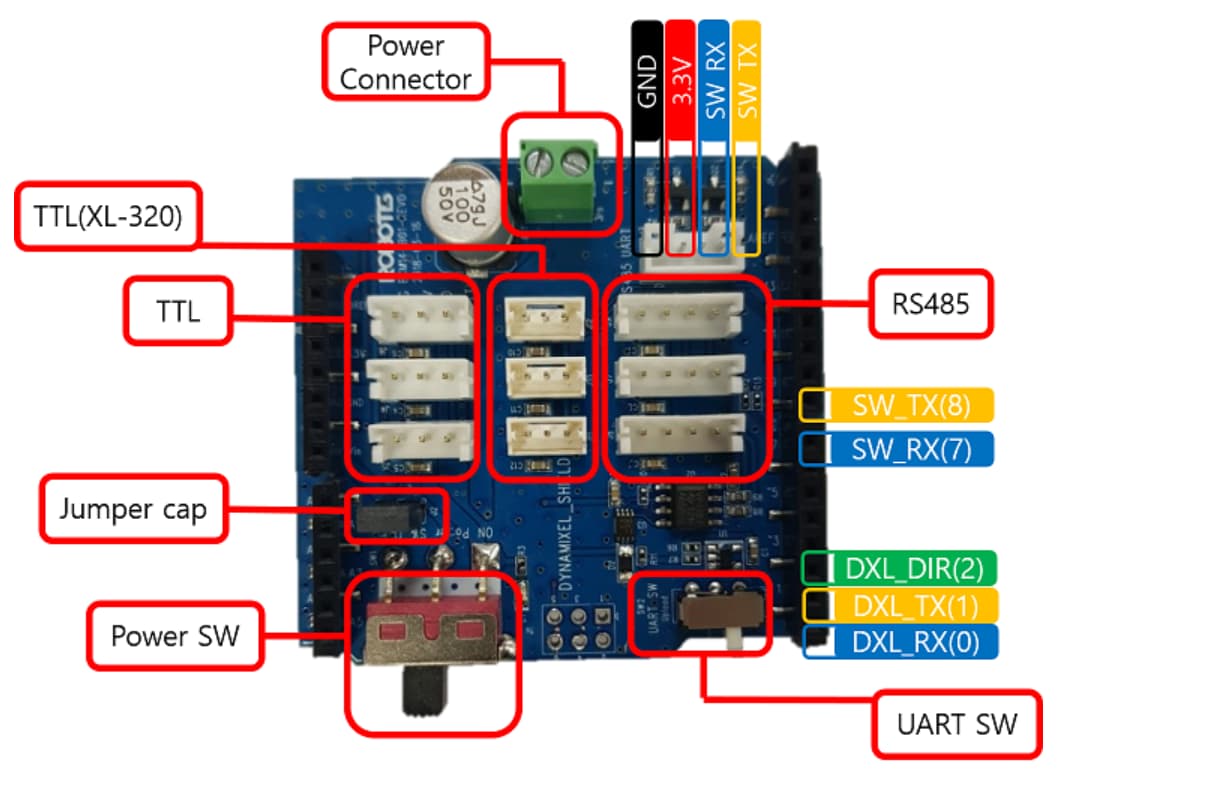
SoftwareSerial soft_serial(7, 8); // DYNAMIXELShield UART RX/TX
#define DEBUG_SERIAL soft_serial
#elif defined(ARDUINO_SAM_DUE) || defined(ARDUINO_SAM_ZERO)
#define DEBUG_SERIAL SerialUSB
#else
#define DEBUG_SERIAL Serial
#endif
const uint8_t DXL_ID = 1;
const float DXL_PROTOCOL_VERSION = 2.0;
DynamixelShield dxl;
//This namespace is required to use Control table item names
using namespace ControlTableItem;
void setup() {
// put your setup code here, to run once:
// For Uno, Nano, Mini, and Mega, use UART port of DYNAMIXEL Shield to debug.
DEBUG_SERIAL.begin(115200);
// Set Port baudrate to 57600bps. This has to match with DYNAMIXEL baudrate.
dxl.begin(57600);
// Set Port Protocol Version. This has to match with DYNAMIXEL protocol version.
dxl.setPortProtocolVersion(DXL_PROTOCOL_VERSION);
// Get DYNAMIXEL information
dxl.ping(DXL_ID);
// Turn off torque when configuring items in EEPROM area
dxl.torqueOff(DXL_ID);
dxl.setOperatingMode(DXL_ID, OP_POSITION);
dxl.torqueOn(DXL_ID);
}
void loop() {
// put your main code here, to run repeatedly:
// Please refer to e-Manual(http://emanual.robotis.com/docs/en/parts/interface/dynamixel_shield/) for available range of value.
// Set Goal Position in RAW value
dxl.setGoalPosition(DXL_ID, 512);
delay(1000);
// Print present position in raw value
DEBUG_SERIAL.print("Present Position(raw) : ");
DEBUG_SERIAL.println(dxl.getPresentPosition(DXL_ID));
delay(1000);
// Set Goal Position in DEGREE value
dxl.setGoalPosition(DXL_ID, 5.7, UNIT_DEGREE);
delay(1000);
// Print present position in degree value
DEBUG_SERIAL.print("Present Position(degree) : ");
DEBUG_SERIAL.println(dxl.getPresentPosition(DXL_ID, UNIT_DEGREE));
delay(1000);
}
Also, the motor doesn't function at all despite the power light turning on. How do I get the motor to work, or even communicate correctly?
I connect the Servo with Shield and Arduino so