Hello, I am using an Arduino Mega 2560 with a Dynamixel Shield to control a Dynamixel AX-12A Servomotor. Whenever I try to run sample code from the DynamixelShield Library (see Github here), there are random characters printed to the serial communication. Also, the motor doesn't function at all despite the power light turning on. How do I get the motor to work, or even communicate correctly? Here is an image of the issue:
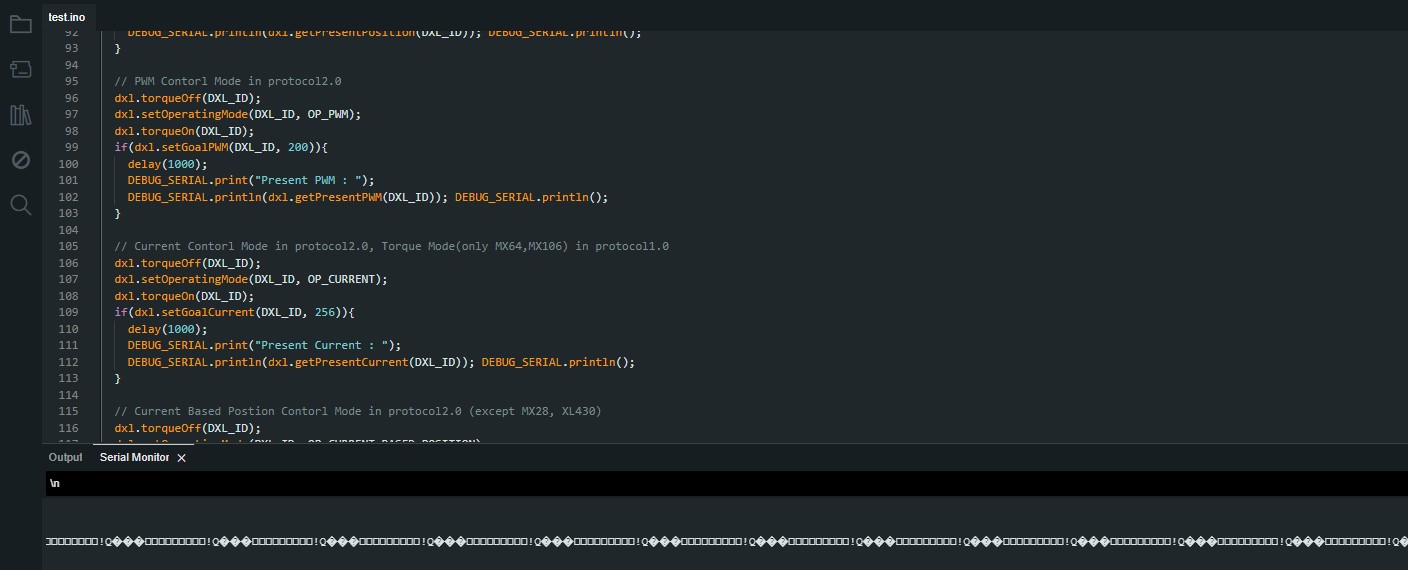
Here is the sample code:
/*******************************************************************************
* Copyright 2016 ROBOTIS CO., LTD.
*
* Licensed under the Apache License, Version 2.0 (the "License");
* you may not use this file except in compliance with the License.
* You may obtain a copy of the License at
*
* http://www.apache.org/licenses/LICENSE-2.0
*
* Unless required by applicable law or agreed to in writing, software
* distributed under the License is distributed on an "AS IS" BASIS,
* WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
* See the License for the specific language governing permissions and
* limitations under the License.
*******************************************************************************/
/** Please refer to each DYNAMIXEL eManual(http://emanual.robotis.com) for supported Operating Mode
* Operating Mode
* 1. OP_POSITION (Position Control Mode in protocol2.0, Joint Mode in protocol1.0)
* 2. OP_VELOCITY (Velocity Control Mode in protocol2.0, Speed Mode in protocol1.0)
* 3. OP_PWM (PWM Control Mode in protocol2.0)
* 4. OP_EXTENDED_POSITION (Extended Position Control Mode in protocol2.0, Multi-turn Mode(only MX series) in protocol1.0)
* 5. OP_CURRENT (Current Control Mode in protocol2.0, Torque Mode(only MX64,MX106) in protocol1.0)
* 6. OP_CURRENT_BASED_POSITION (Current Based Postion Control Mode in protocol2.0 (except MX28, XL430))
*/
#include <DynamixelShield.h>
#if defined(ARDUINO_AVR_UNO) || defined(ARDUINO_AVR_MEGA2560)
#include <SoftwareSerial.h>
SoftwareSerial soft_serial(7, 8); // DYNAMIXELShield UART RX/TX
#define DEBUG_SERIAL soft_serial
#elif defined(ARDUINO_SAM_DUE) || defined(ARDUINO_SAM_ZERO)
#define DEBUG_SERIAL SerialUSB
#else
#define DEBUG_SERIAL Serial
#endif
const uint8_t DXL_ID = 1;
const float DXL_PROTOCOL_VERSION = 2.0;
DynamixelShield dxl;
//This namespace is required to use Control table item names
using namespace ControlTableItem;
void setup() {
// put your setup code here, to run once:
// For Uno, Nano, Mini, and Mega, use UART port of DYNAMIXEL Shield to debug.
DEBUG_SERIAL.begin(115200);
// Set Port baudrate to 57600bps. This has to match with DYNAMIXEL baudrate.
dxl.begin(57600);
// Set Port Protocol Version. This has to match with DYNAMIXEL protocol version.
dxl.setPortProtocolVersion(DXL_PROTOCOL_VERSION);
// Get DYNAMIXEL information
dxl.ping(DXL_ID);
}
void loop() {
// put your main code here, to run repeatedly:
// Position Control Mode in protocol2.0, Joint Mode in protocol1.0
// Turn off torque when configuring items in EEPROM area
dxl.torqueOff(DXL_ID);
dxl.setOperatingMode(DXL_ID, OP_POSITION);
dxl.torqueOn(DXL_ID);
if(dxl.setGoalPosition(DXL_ID, 512)){
delay(1000);
DEBUG_SERIAL.print("Present Position : ");
DEBUG_SERIAL.println(dxl.getPresentPosition(DXL_ID)); DEBUG_SERIAL.println();
}
// Velocity Contorl Mode in protocol2.0, Speed Mode in protocol1.0
dxl.torqueOff(DXL_ID);
dxl.setOperatingMode(DXL_ID, OP_VELOCITY);
dxl.torqueOn(DXL_ID);
if(dxl.setGoalVelocity(DXL_ID, 128)){
delay(1000);
DEBUG_SERIAL.print("Present Velocity : ");
DEBUG_SERIAL.println(dxl.getPresentVelocity(DXL_ID)); DEBUG_SERIAL.println();
}
// Extended Position Contorl Mode in protocol2.0, Multi-turn Mode(only MX series) in protocol1.0
dxl.torqueOff(DXL_ID);
dxl.setOperatingMode(DXL_ID, OP_EXTENDED_POSITION);
dxl.torqueOn(DXL_ID);
if(dxl.setGoalPosition(DXL_ID, 4096)){
delay(1000);
DEBUG_SERIAL.print("Present Extended Position : ");
DEBUG_SERIAL.println(dxl.getPresentPosition(DXL_ID)); DEBUG_SERIAL.println();
}
// PWM Contorl Mode in protocol2.0
dxl.torqueOff(DXL_ID);
dxl.setOperatingMode(DXL_ID, OP_PWM);
dxl.torqueOn(DXL_ID);
if(dxl.setGoalPWM(DXL_ID, 200)){
delay(1000);
DEBUG_SERIAL.print("Present PWM : ");
DEBUG_SERIAL.println(dxl.getPresentPWM(DXL_ID)); DEBUG_SERIAL.println();
}
// Current Contorl Mode in protocol2.0, Torque Mode(only MX64,MX106) in protocol1.0
dxl.torqueOff(DXL_ID);
dxl.setOperatingMode(DXL_ID, OP_CURRENT);
dxl.torqueOn(DXL_ID);
if(dxl.setGoalCurrent(DXL_ID, 256)){
delay(1000);
DEBUG_SERIAL.print("Present Current : ");
DEBUG_SERIAL.println(dxl.getPresentCurrent(DXL_ID)); DEBUG_SERIAL.println();
}
// Current Based Postion Contorl Mode in protocol2.0 (except MX28, XL430)
dxl.torqueOff(DXL_ID);
dxl.setOperatingMode(DXL_ID, OP_CURRENT_BASED_POSITION);
dxl.torqueOn(DXL_ID);
if(dxl.setGoalPosition(DXL_ID, 8192)){
delay(1000);
DEBUG_SERIAL.print("Present Current Based Position : ");
DEBUG_SERIAL.println(dxl.getPresentPosition(DXL_ID)); DEBUG_SERIAL.println();
}
}
Thank you for the help