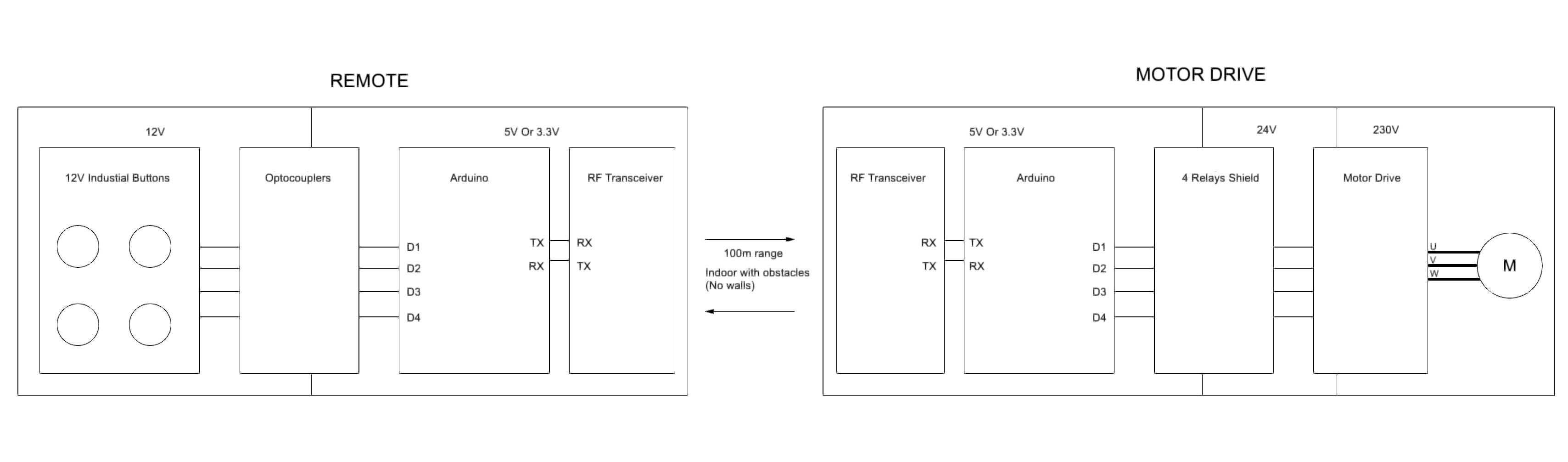
One Arduino will be used as a remote, and the other as an interface to control motors drives, the range must be about 100m, indoors, with obstacles such as wooden frames and fabrics but no walls. Some safety will be implemented in the code (the motors will stop if the connection to the remote is lost for example), but the project still needs a robust connection to avoid the motors stopping because of a lost connection.
I found the HC-12 module, which seemed to have sufficient range, and easy setup (just sending character via serial !)
I also thought about the Digi XBee® RR Module from sparkfun, with arduino shield, but it seemed a bit too complicated to setup.
Do you have other suggestions ? I saw the MKR family for example, but it didn't seem suited to the project. Budget isn't an issue.
We use hc-12 on a couple of projects and is working reliably.
We use a 'standard' setting of 11dbm as in the same environment there are a few different units ( working on different channels ), and increase it only if necessary ( non standard applications ). Good product, and super simple to setup ( we previusly used a bluetooth module that required a binding between rx and tx ), with simple addressing you can do 1-to-1, 1-to-multi...
I am also interested in this topic. I have two HC-12 devices under test now talking to each other and lighting a led to indicate transmission/receipt and they seem OK, recovering from power cycles at either end etc. I've tested using two of the transmission modes , FU3 and FU1. The concept is that they provide a serial tunnel between two Arduinos so are easy to use. I've not yet verified the power consumption but with a claimed 22uA in sleep mode, should be suitable for long term battery operation in the case that small amounts of data are transmitted at intervals of tens of seconds or more.
However, they do not seem to provide any error checking and automatic retries, such as is provided by the NRF24L01 and others, so you should probably include some sort of check sum with any data sent to be able to recognise any errors in transmission.
Indeed, I was worried about error checking and retries. I intend to implement it myself in the code, but as it's a half duplex communication, I'm a bit worried about loosing transmissions during a retry... I'll have to be precise with the timings as I intend to sent a message every 100ms !
Have you noticed changes in performances/stability between these two modes (FU1 and FU3)? @davidefa@6v6gt What baud rate are you using ? And what distance ? It seems like there's a balance to find between the range you want, and the speed at which you communicate.
I'll come back here to let you know how it goes once we start programming everything.
Thank you very much for your advice, it confirms some things I wanted to implement and adds some I hadn't thought about !
The remote sends a command each 100ms, the motor side will answer with a status update each time. (And a safety timeout will be implemented in case of lost connection)
See jdx-40/41, it are the rf modules , similar to hc-12 in matter of communication range and reliability.
Two modules can be used as transparent serial link. Jdx40is way cheaper than hc-12
For hc12 I use FU3 ( faster response ) at 57600 baud.
For jdy40 ( never used it ), it is 2.4GHz, max 12dbm, and only pcb antenna ( no external connector )