Hi All,
I have a problem managing the absolute angles on a BMI160 IMU sensor , the sensor is connected in i2C to an Atmega2560.
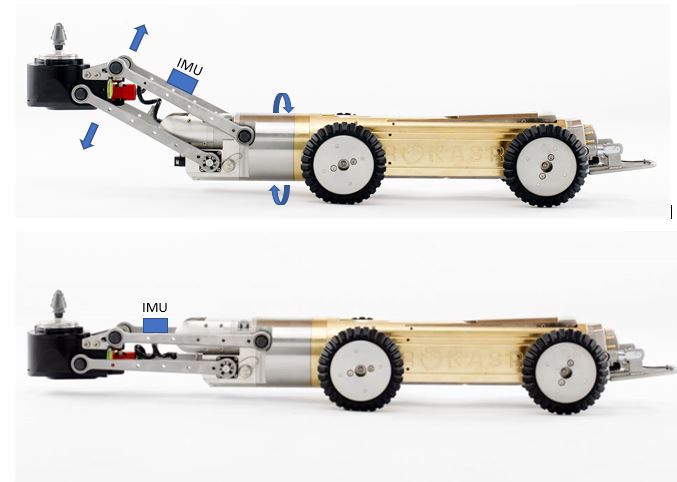
Phisically the board is mounted on an arm that can rotate 360° around IMU X axis and tilt around Y axeis +/- 80°.
The problem I have is that "Roll" angle ( arm rotation) start from 0 and go to +/-90° depending on rotation side and then start decreasing again to 0 , for example a real 100° return 80°, at the same time Pitch angle jump from 0 to something close to 180° when roll pass 90°.
I tried this code that use different type of filters but all the outputs have the same behaviour exept the gyro_roll that measure a full 360 angle but is obviously subject to a big drift overtime.
Someone that face the same problem can help me ?
Thanks in advanced
Flavio
#include <Wire.h>
#include <math.h>
#include <BMI160Gen.h>
#include <Kalman.h>
#include <MadgwickAHRS.h>
#define PRINT_PROCESSING
#define BAUDRATE 115200
#define SENSE_RATE 100
#define GYRO_RANGE 250
#define ACCL_RANGE 2
#define deg_to_rad(a) (a/180*M_PI)
#define rad_to_deg(a) (a/M_PI*180)
Kalman kalmanRoll;
Kalman kalmanPitch;
Madgwick madgwick;
float convertRawGyro(int gRaw) {
// ex) if the range is +/-500 deg/s: +/-32768/500 = +/-65.536 LSB/(deg/s)
float lsb_omega = float(0x7FFF) / GYRO_RANGE;
return gRaw / lsb_omega; // deg/sec
}
float convertRawAccel(int aRaw) {
// ex) if the range is +/-2g ; +/-32768/2 = +/-16384 LSB/g
float lsb_g = float(0x7FFF) / ACCL_RANGE;
return aRaw / lsb_g;
}
static float gyro_roll = 0, gyro_pitch = 0, gyro_yaw = 0;
static float comp_roll = 0, comp_pitch = 0;
static unsigned long last_mills = 0;
void print_roll_pitch()
{
// read raw accl measurements from device
int rawXAcc, rawYAcc, rawZAcc; // x, y, z
BMI160.readAccelerometer(rawXAcc, rawYAcc, rawZAcc);
float accX = convertRawAccel(rawXAcc);
float accY = convertRawAccel(rawYAcc);
float accZ = convertRawAccel(rawZAcc);
float rad_a_roll = atan2(accY, accZ);
float rad_a_pitch = atan2(-accX, sqrt(accY*accY + accZ*accZ));
float accl_roll = rad_to_deg(rad_a_roll);
float accl_pitch = rad_to_deg(rad_a_pitch);
// read raw gyro measurements from device
int rawRoll, rawPitch, rawYaw; // roll, pitch, yaw
BMI160.readGyro(rawRoll, rawPitch, rawYaw);
float omega_roll = convertRawGyro(rawRoll);
float omega_pitch = convertRawGyro(rawPitch);
float omega_yaw = convertRawGyro(rawYaw);
unsigned long cur_mills = micros();
unsigned long duration = cur_mills - last_mills;
last_mills = cur_mills;
double dt = duration / 1000000.0; // us->s
if (dt > 0.1) return;
// Gyro data
gyro_roll += omega_roll * dt; // (ms->s) omega x time = degree
gyro_pitch += omega_pitch * dt;
gyro_yaw += omega_yaw * dt;
// Complementary filter data
comp_roll = 0.93 * (comp_roll + omega_roll * dt) + 0.07 * accl_roll;
comp_pitch = 0.93 * (comp_pitch + omega_pitch * dt) + 0.07 * accl_pitch;
// Kalman filter data
float kalm_roll = kalmanRoll.getAngle(accl_roll, omega_roll, dt);
float kalm_pitch = kalmanPitch.getAngle(accl_pitch, omega_pitch, dt);
// Madgwick filter data
madgwick.updateIMU2(omega_roll, omega_pitch, omega_yaw, accX, accY, accZ, dt);
// madgwick.updateIMU(omega_roll, omega_pitch, omega_yaw, accX, accY, accZ);
float madw_roll = madgwick.getRoll();
float madw_pitch = madgwick.getPitch();
float madw_yaw = madgwick.getYaw();
#ifdef PRINT_PROCESSING
static int n = 0;
if (n != 50) {
++n; return;
}
n = 0;
Serial.print(accl_roll);
Serial.print(",");
Serial.print(accl_pitch);
Serial.print(",");
Serial.print(madw_yaw);
Serial.print(",");
Serial.print(gyro_roll);
Serial.print(",");
Serial.print(gyro_pitch);
Serial.print(",");
Serial.print(madw_yaw);
Serial.print(",");
Serial.print(comp_roll);
Serial.print(",");
Serial.print(comp_pitch);
Serial.print(",");
Serial.print(madw_yaw);
Serial.print(",");
Serial.print(kalm_roll);
Serial.print(",");
Serial.print(kalm_pitch);
Serial.print(",");
Serial.print(madw_yaw);
Serial.print(",");
Serial.print(madw_roll);
Serial.print(",");
Serial.print(madw_pitch);
Serial.print(",");
Serial.print(madw_yaw);
Serial.print(",");
#endif
Serial.println();
}
void setup() {
Serial.begin(115200);
BMI160.begin(BMI160GenClass::I2C_MODE);
madgwick.begin(SENSE_RATE);
BMI160.setGyroRate(SENSE_RATE);
BMI160.setAccelerometerRate(SENSE_RATE);
BMI160.setGyroRange(GYRO_RANGE);
BMI160.setAccelerometerRange(ACCL_RANGE);
BMI160.autoCalibrateGyroOffset();
BMI160.autoCalibrateAccelerometerOffset(X_AXIS, 0);
BMI160.autoCalibrateAccelerometerOffset(Y_AXIS, 0);
BMI160.autoCalibrateAccelerometerOffset(Z_AXIS, 1);
delay(100);
/* Set kalman and gyro starting angle */
int rawXAcc, rawYAcc, rawZAcc;
BMI160.readAccelerometer(rawXAcc, rawYAcc, rawZAcc);
float accX = convertRawAccel(rawXAcc);
float accY = convertRawAccel(rawYAcc);
float accZ = convertRawAccel(rawZAcc);
float roll = rad_to_deg(atan(accY / accZ));
float pitch = rad_to_deg(atan(-accX / sqrt(accY * accY + accZ * accZ)));
// Set starting angle
kalmanRoll.setAngle(roll);
kalmanPitch.setAngle(pitch);
gyro_roll = comp_roll = roll;
gyro_pitch = gyro_pitch = pitch;
}
void loop() {
print_roll_pitch();
}