I am building a grid made of 20 x 20 dices, each 20x20x20 mm. I want to be able to lower and lift each dice by 20 mm, using some kind of actuators beneath the matrix with each 20mm stroke.
Each actuator should have a power of about 20 Newton.
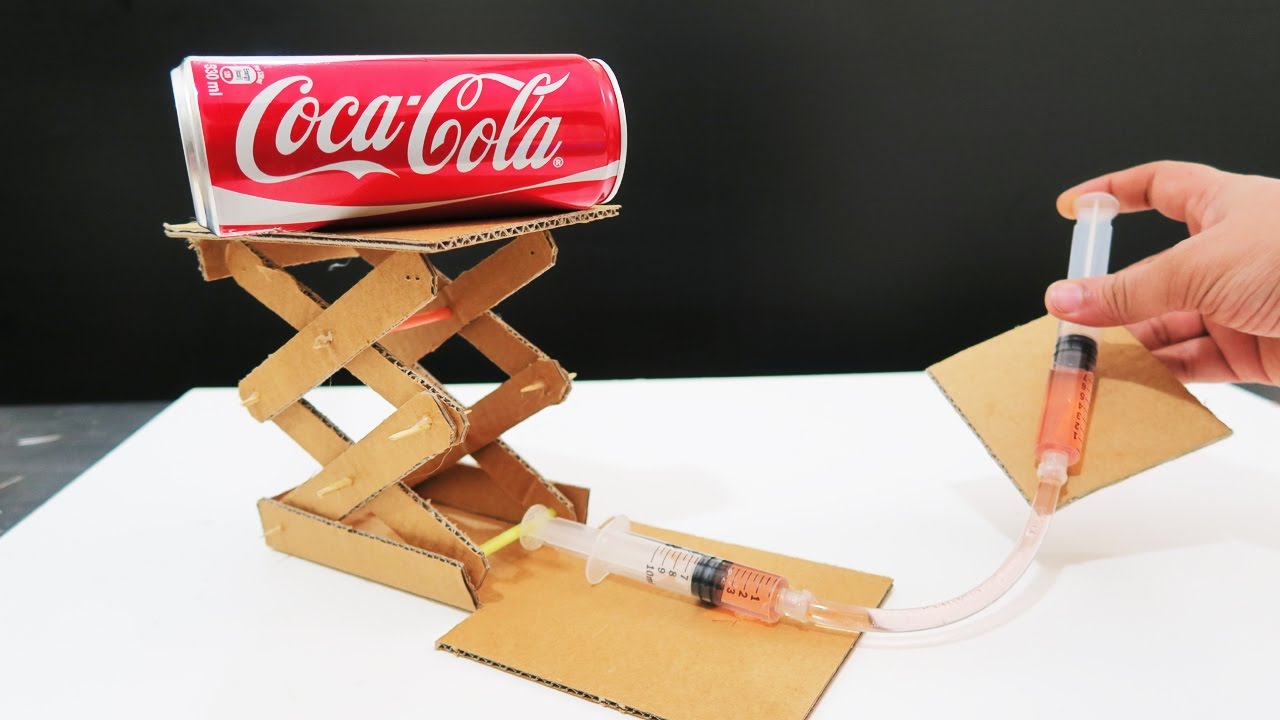
I am looking for the best solution for the "actuators" I could be a grid of controlled pneumatic cylinders, controlling electric valves, it could be electromagnets, it could be linear actuators with spindles. But as you can see, with 400 of these it should be a possibly cheapest solution. Does anyone have ideas, wich "actuator" could be an innovative an cheap way to achieve that?
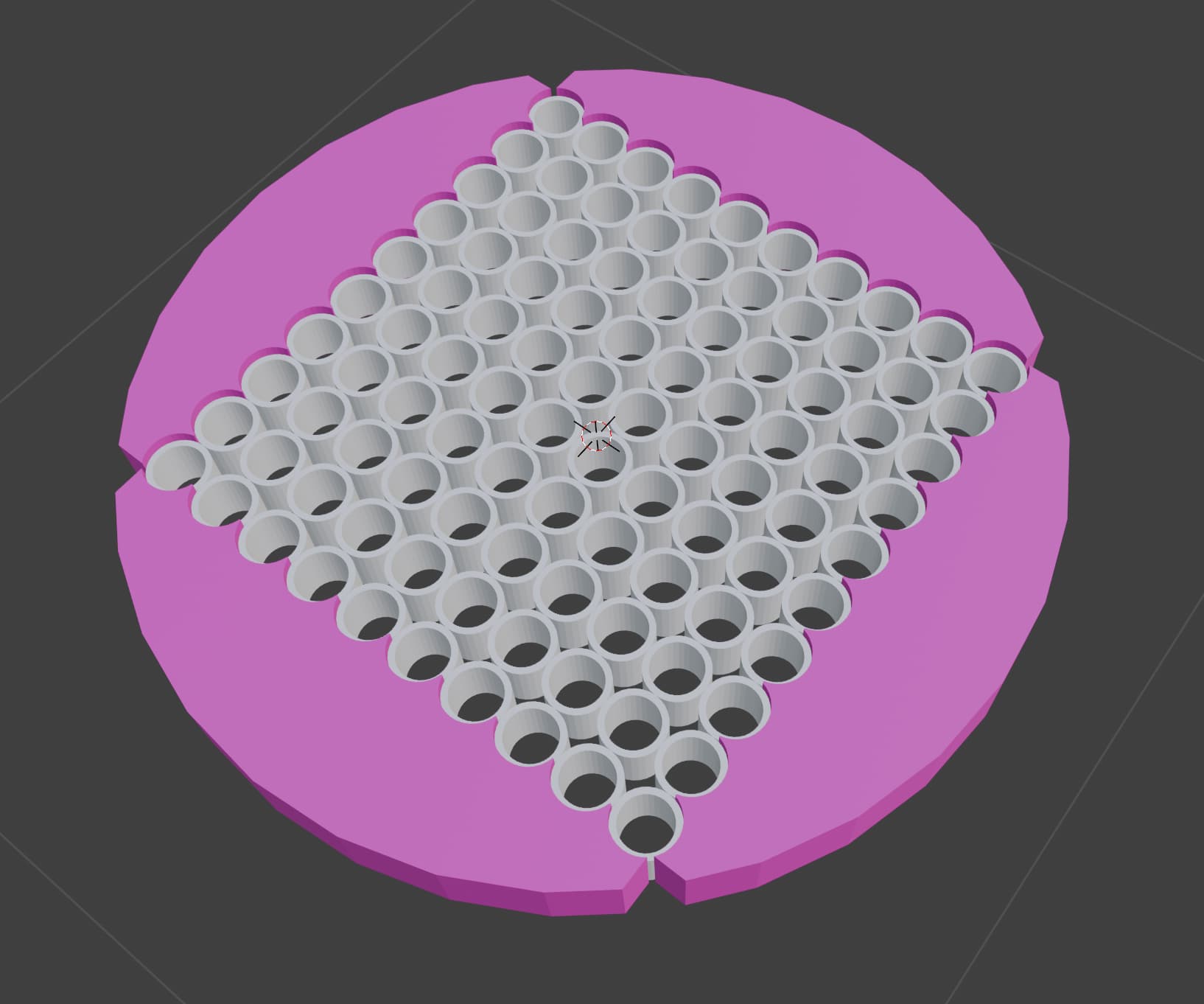
Here is a picture of a version with tubes instead of cubes. I guess, from the "challenge" described here, cubes or tubes should not make a big difference. But I hope this picture helps understanding what I want to achieve
Ok, and what goes into the tube? And do you have a prototype to work with. So far you are designing the end result before you get the mechanical part worked out.
I guess we need more info about your project: what you are trying to accomplish here and where the requirement came from.
What is "a while"? Do you have a time constraint? Will you move several pieces simultaneously? How do you determine the sequence in which they should move?
My thought here is a straight (not tapered) screw like a self-tapping sheet metal screw and a small piece of plastic to serve as the lead nut. In theory it would work, but I have no idea for how long
Alternately, you could 3D print leadscrews and nuts.
The Tube will stay empty. The Whole construction is used to lift leight weight objects with a shape represented by the pipes that move. For example: If a ring would be lifted by the pipes or cubes, the pipes or cubes underneath that ring would go up 20 mm.
I do not have a prototype yet, I started of with visualizing the project in Blender.
Its less an issue of feasibility. I am just looking for the cheapest way to achieve it.
Thanks so far to all for the help and brain power!
I would like to move all pieces simultaneously, but if its too expensive, they could also lift the object in a sequenced order. But I would prefer it to be simultaneously.
If in a sequence, there is no need for a predefined order.
I get the "Newton"-mistake, sorry for that. I also mistyped: It should have been 200 Gram, not 2 kg each, sorry for that.