Hello again!
I am attempting to work towards a goal of making a joystick "button box" (as you've seen many a youtube video of, and probably a million forum posts).
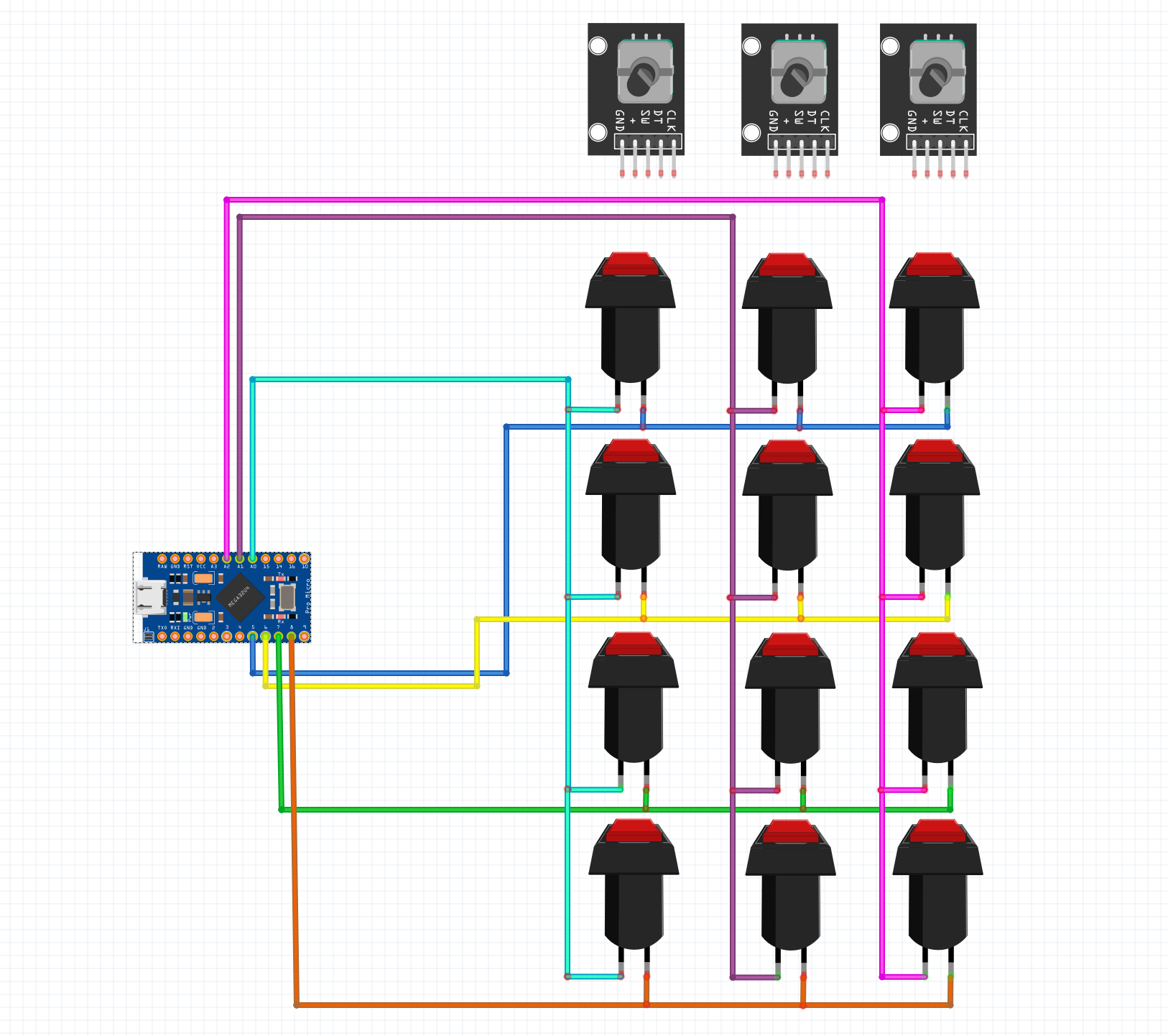
Before I go into the coding aspect of everything, I wanted to see if you guys could check and see if my button matrix is correct. This would be my first time attempting something of the sort, so I want to make sure I'm good to go:
The Code would look something like this:
#include <Keypad.h>
#include <Joystick.h>
//DEFINITIONS
#define ENABLE_PULLUPS
#define NUMROTARIES 3 //replace "?" with number of rotary encoders you are using
#define NUMBUTTONS 12 //replace "?"with number of buttong you are using
#define NUMROWS 4 //replace "?" with number of rows you have
#define NUMCOLS 3 //replace "?" with number of columns you have
//BUTTON MATRIX
//first change number of rows and columns to match your button matrix,
//then replace all "?" with numbers (starting from 0)
byte buttons[NUMROWS][NUMCOLS] = {
{0,1,2},
{3,4,5},
{6,7,8},
{9,10,11}
};
struct rotariesdef {
byte pin1;
byte pin2;
int ccwchar;
int cwchar;
volatile unsigned char state;
};
//ROTARY ENCODERS
//each line controls a different rotary encoder
//the first two numbers refer to the pins the encoder is connected to
//the second two are the buttons each click of the encoder wil press
//do NOT exceed 31 for the final button number
rotariesdef rotaries[NUMROTARIES] {
{3,4,22,23,0}, //rotary 1
{15,14,24,25,0}, //rotary 2
{16,10,26,27,0}, //rotary 3
};
#define DIR_CCW 0x10
#define DIR_CW 0x20
#define R_START 0x0
#ifdef HALF_STEP
#define R_CCW_BEGIN 0x1
#define R_CW_BEGIN 0x2
#define R_START_M 0x3
#define R_CW_BEGIN_M 0x4
#define R_CCW_BEGIN_M 0x5
const unsigned char ttable[6][4] = {
// R_START (00)
{R_START_M, R_CW_BEGIN, R_CCW_BEGIN, R_START},
// R_CCW_BEGIN
{R_START_M | DIR_CCW, R_START, R_CCW_BEGIN, R_START},
// R_CW_BEGIN
{R_START_M | DIR_CW, R_CW_BEGIN, R_START, R_START},
// R_START_M (11)
{R_START_M, R_CCW_BEGIN_M, R_CW_BEGIN_M, R_START},
// R_CW_BEGIN_M
{R_START_M, R_START_M, R_CW_BEGIN_M, R_START | DIR_CW},
// R_CCW_BEGIN_M
{R_START_M, R_CCW_BEGIN_M, R_START_M, R_START | DIR_CCW},
};
#else
#define R_CW_FINAL 0x1
#define R_CW_BEGIN 0x2
#define R_CW_NEXT 0x3
#define R_CCW_BEGIN 0x4
#define R_CCW_FINAL 0x5
#define R_CCW_NEXT 0x6
const unsigned char ttable[7][4] = {
// R_START
{R_START, R_CW_BEGIN, R_CCW_BEGIN, R_START},
// R_CW_FINAL
{R_CW_NEXT, R_START, R_CW_FINAL, R_START | DIR_CW},
// R_CW_BEGIN
{R_CW_NEXT, R_CW_BEGIN, R_START, R_START},
// R_CW_NEXT
{R_CW_NEXT, R_CW_BEGIN, R_CW_FINAL, R_START},
// R_CCW_BEGIN
{R_CCW_NEXT, R_START, R_CCW_BEGIN, R_START},
// R_CCW_FINAL
{R_CCW_NEXT, R_CCW_FINAL, R_START, R_START | DIR_CCW},
// R_CCW_NEXT
{R_CCW_NEXT, R_CCW_FINAL, R_CCW_BEGIN, R_START},
};
#endif
//BUTTON MATRIX PART 2
byte rowPins[NUMROWS] = {5,6,7,8}; //change "?" to the pins the rows of your button matrix are connected to
byte colPins[NUMCOLS] = {A0,A1,A2}; //change "?" to the pins the rows of your button matrix are connected to
Keypad buttbx = Keypad( makeKeymap(buttons), rowPins, colPins, NUMROWS, NUMCOLS);
//JOYSTICK SETTINGS
Joystick_ Joystick(JOYSTICK_DEFAULT_REPORT_ID,
JOYSTICK_TYPE_JOYSTICK,
32, //number of buttons
0, //number of hat switches
//Set as many axis to "true" as you have potentiometers for
false, // y axis
false, // x axis
false, // z axis
false, // rx axis
false, // ry axis
false, // rz axis
false, // rudder
false, // throttle
false, // accelerator
false, // brake
false); // steering wheel
const int numReadings = 20;
int readings[numReadings]; // the readings from the analog input
int index = 0; // the index of the current reading
int total = 0; // the running total
int currentOutputLevel = 0;
//POTENTIOMETERS PART 1
//add all the axis' which are enabled above
int zAxis_ = 0;
int RxAxis_ = 0;
//POTENTIOMETERS PART 2
//Which pins are your potentiometers connected to?
//int potentiometerPin1 = ?; //Change "?" to the pin your potentiometer is connected to
//int potentiometerPin2 = ?;
//const bool initAutoSendState = true;
void setup() {
Joystick.begin();
rotary_init();
for (int thisReading = 0; thisReading < numReadings; thisReading++) {
readings[thisReading] = 0;
}
}
void loop() {
CheckAllEncoders();
CheckAllButtons();
CheckAllPotentiometers();
}
//POTENTIOMETERS PART 3
//change the details to match teh details above for each potentiometer you are using
void CheckAllPotentiometers(){
//potentiometer 1
// currentOutputLevel = getAverageOutput(potentiometerPin1);
// zAxis_ = map(currentOutputLevel,0,1023,0,255);
// Joystick.setZAxis(zAxis_);
//potentiometer 2
// currentOutputLevel = getAverageOutput(potentiometerPin2);
// RxAxis_ = map(currentOutputLevel,0,1023,0,255);
// Joystick.setRxAxis(RxAxis_);
}
int getAverageOutput(int pinToRead){
index = 0;
total = 0;
while (index < numReadings){
readings[index] = analogRead(pinToRead);
total = total + readings[index];
index = index + 1;
//delay (1);
}
return total / numReadings;
}
void CheckAllButtons(void) {
if (buttbx.getKeys())
{
for (int i=0; i<LIST_MAX; i++)
{
if ( buttbx.key[i].stateChanged )
{
switch (buttbx.key[i].kstate) {
case PRESSED:
case HOLD:
Joystick.setButton(buttbx.key[i].kchar, 1);
break;
case RELEASED:
case IDLE:
Joystick.setButton(buttbx.key[i].kchar, 0);
break;
}
}
}
}
}
void rotary_init() {
for (int i=0;i<NUMROTARIES;i++) {
pinMode(rotaries[i].pin1, INPUT);
pinMode(rotaries[i].pin2, INPUT);
#ifdef ENABLE_PULLUPS
digitalWrite(rotaries[i].pin1, HIGH);
digitalWrite(rotaries[i].pin2, HIGH);
#endif
}
}
unsigned char rotary_process(int _i) {
//Serial.print("Processing rotary: ");
//Serial.println(_i);
unsigned char pinstate = (digitalRead(rotaries[_i].pin2) << 1) | digitalRead(rotaries[_i].pin1);
rotaries[_i].state = ttable[rotaries[_i].state & 0xf][pinstate];
return (rotaries[_i].state & 0x30);
}
void CheckAllEncoders(void) {
Serial.println("Checking rotaries");
for (int i=0;i<NUMROTARIES;i++) {
unsigned char result = rotary_process(i);
if (result == DIR_CCW) {
Serial.print("Rotary ");
Serial.print(i);
Serial.println(" <<< Going CCW");
Joystick.setButton(rotaries[i].ccwchar, 1); delay(50); Joystick.setButton(rotaries[i].ccwchar, 0);
};
if (result == DIR_CW) {
Serial.print("Rotary ");
Serial.print(i);
Serial.println(" >>> Going CW");
Joystick.setButton(rotaries[i].cwchar, 1); delay(50); Joystick.setButton(rotaries[i].cwchar, 0);
};
}
Serial.println("Done checking");
}
Can someone look over this and see if I'm on the correct path here? Please note that I'm omitting the potentiometers because I don't plan on using them in this build.
Also you'll note that there are 3 rotary encoders. Can anyone walk me through how the 5 pinout is connected to the Arduino here? Most rotary encoders I see have 2 pins being connected.
Thank you everyone so much in advance. I am having a lot of fun!