scusate il ritardo ... si infatti nell'ide è impostato Arduino nano ESp32 che è anche l'unico della lista non ci sono altri ESP32 da scegliere. Grazie
Ed è sbagliato.
Come ti ha già fatto notare Guglielmo, il set di esempi includi è pensato per essere compilato con la versione v2.x.x del core ESP32 per Arduino, selezionando la scheda ESP32 Dev board che è una cosa completamente diversa dalla board Arduino nano ESP32 di cui condivide solo la "famiglia" del microcontrollore.
A pagina 14 del pdf Assembly and Arduino tutorial c'è scritto passo passo quello che è necessario fare.
Se invece di usare le librerie include come file, provi ad installarle dal web usando le versioni più aggiornate, dovresti riuscire a compilare anche con la versione v3.x.x del core ESP32 per Arduino.
aspettate ... troppe informazioni .... ora probabilmente mi conviene disinstallare tutto e ripetere la procedura di installazione dell'IDE... mi ci vorrà un pò di tempo. grazie
Confermo che con la vecchia versione del software ESP 2.0.4 (è l'ultima che posso usare su macOS Mojave), con il file "platform.txt" modificato per evitare che tratti alcuni warning come errori, compila correttamente.
Loro dicono di usare la 2.0.6 ... magari in quella hanno eliminato quelle inutili flags all'interno di platform.txt ![]()
Guglielmo
Se non ricordo male si, avevano eliminato quella cosa piuttosto noiosa di trattare i warning del compilatore come errori.
1 Like
ragazzi ho ripetuto la configurazione delle ide e reinserito le librerie che dicono ho provato seguendo le istruzioni l'impostazione del servo a180 come dicono non mi ha fatto errori di compilazione mi è venuto questo

Ma il servo è collegato correttamente e correttamente alimentato?
Guglielmo
beh l'ho collegato come dicono e fanno vedere sulla scheda di montaggio io26 ho verificato con un provaservo e funziona
Quel programmino fa solo una cosa, dice al servo di posizionarsi in una determinata posizione e null'altro ...
... se il servo è già in quella posizione, non lo vedi neanche muovere.
Per il resto è tutto normale ... il loop() è vuoto quindi ... cosa altro dovrebbe fare?
Il tutto è documentato a pag. 16 e 17 del solito pdf.
Guglielmo
si l'ho visto il solito pdf c'è un altro programmino che dovrebbe fare qualcosa di diverso mo provo
messaggio identico al precedente .... ma il servo non fa nulla credo dovrebbe andare avanti e indietro ma non lo fa

... controlla perché sono, quasi certamente, sbagliati i collegamenti.
Altrimenti modificalo cosi:
#include <ESP32_Servo.h> //Import the library of servo
Servo myservo; // create servo object to control a servo
// 16 servo objects can be created on the ESP32
int pos = 0; // variable to store the servo position
// Recommended PWM GPIO pins on the ESP32 include 2,4,12-19,21-23,25-27,32-33
int servoPin = 26;
void setup() {
Serial.begin(9600);
myservo.attach(servoPin); // attaches the servo on pin 26 to the servo object
myservo.write(180);
delay(2000);
}
void loop() {
for (pos = 80; pos <= 179; pos += 1) { // goes from 0 degrees to 80 degrees
Serial.print ("Posizione servo: ");
Serial.println(pos);
//
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
//
for (pos = 180; pos >= 81; pos -= 1) { // goes from 80 degrees to 0 degrees
Serial.print ("Posizione servo: ");
Serial.println(pos);
//
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
}
... apri il monitor seriale dell'IDE impostando la velocità a 9600 e dovresti vedere i messaggi che ho aggiunto.
Guglielmo
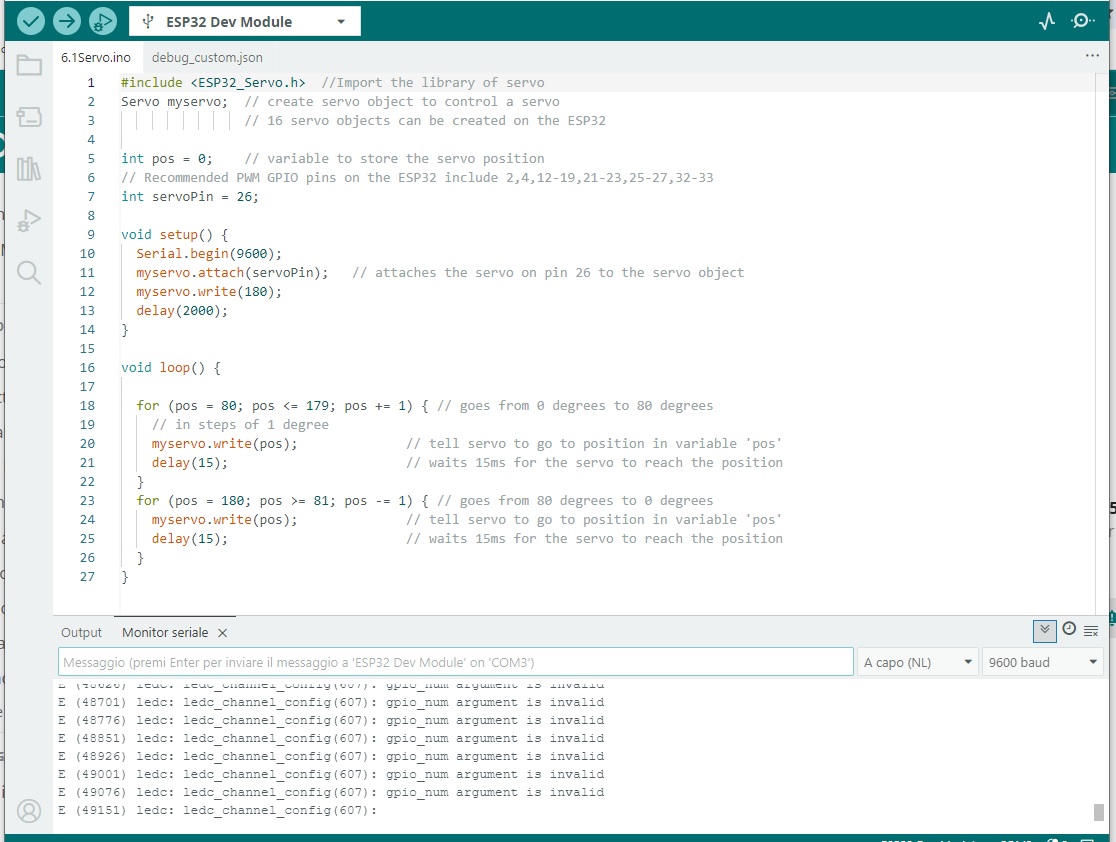

Devi cambiare il PIN a cui è collegato il servo.
ma è già sul pin 26 non c'e ne sono altri pin con lo stesso numero come da istruzioni va inserito nel pin io26 non altri
L'errore è chiaro: "gpio_num argument is invalid"
Prova a spostarlo sul 2 o sul 4.
Se riesci aggiungi anche lo screenshot della compilazione (senza upload).
dici impostano nel programma invece del 26 in n .2 e poi compilare ho capito bene?