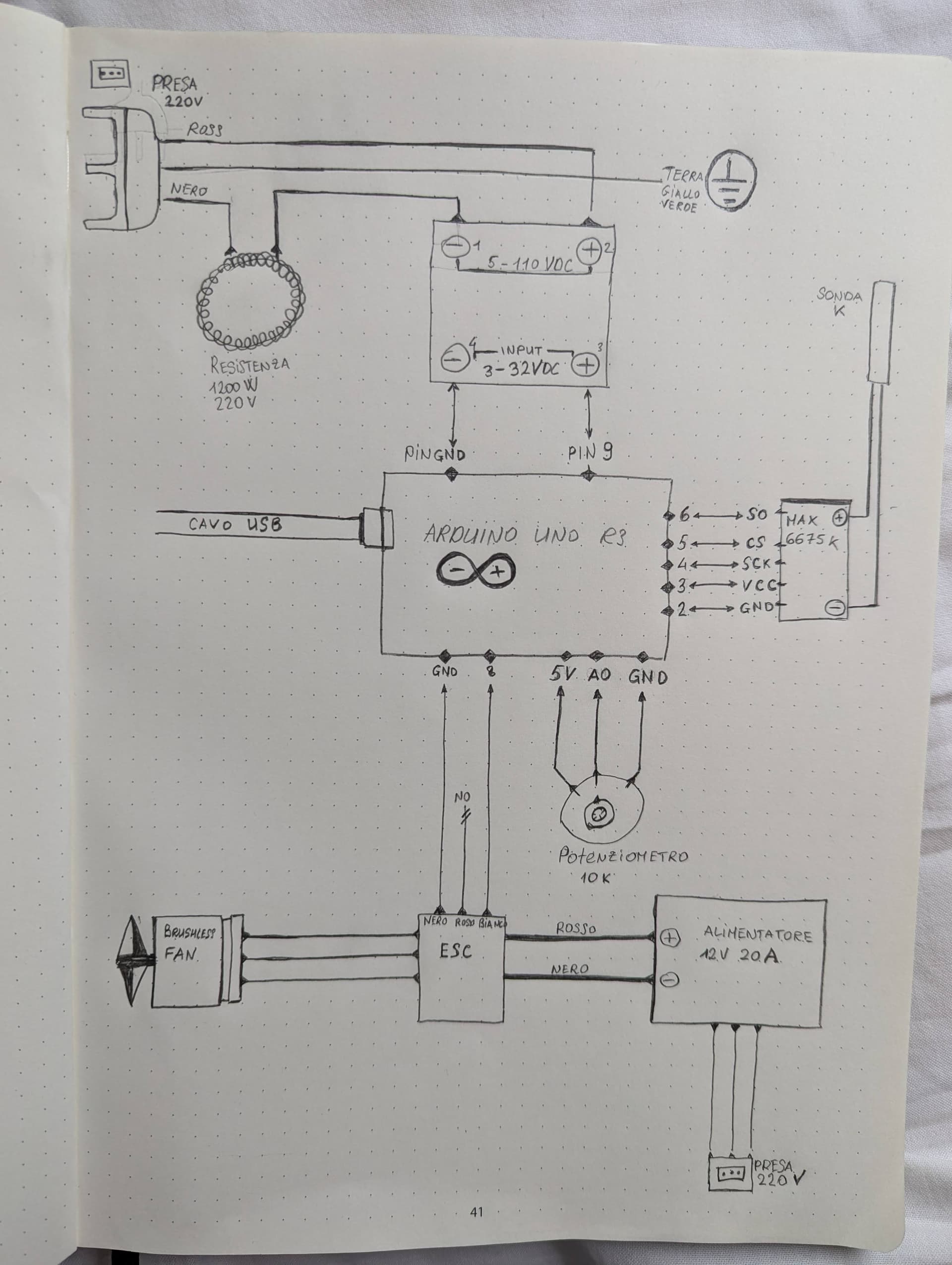
good morning everyone, for a few days I've been trying to create a coffee roaster from a popcorn machine and control it with Artisan Scope. These will be the components:
- PopCorn Machine 1200W - 220V
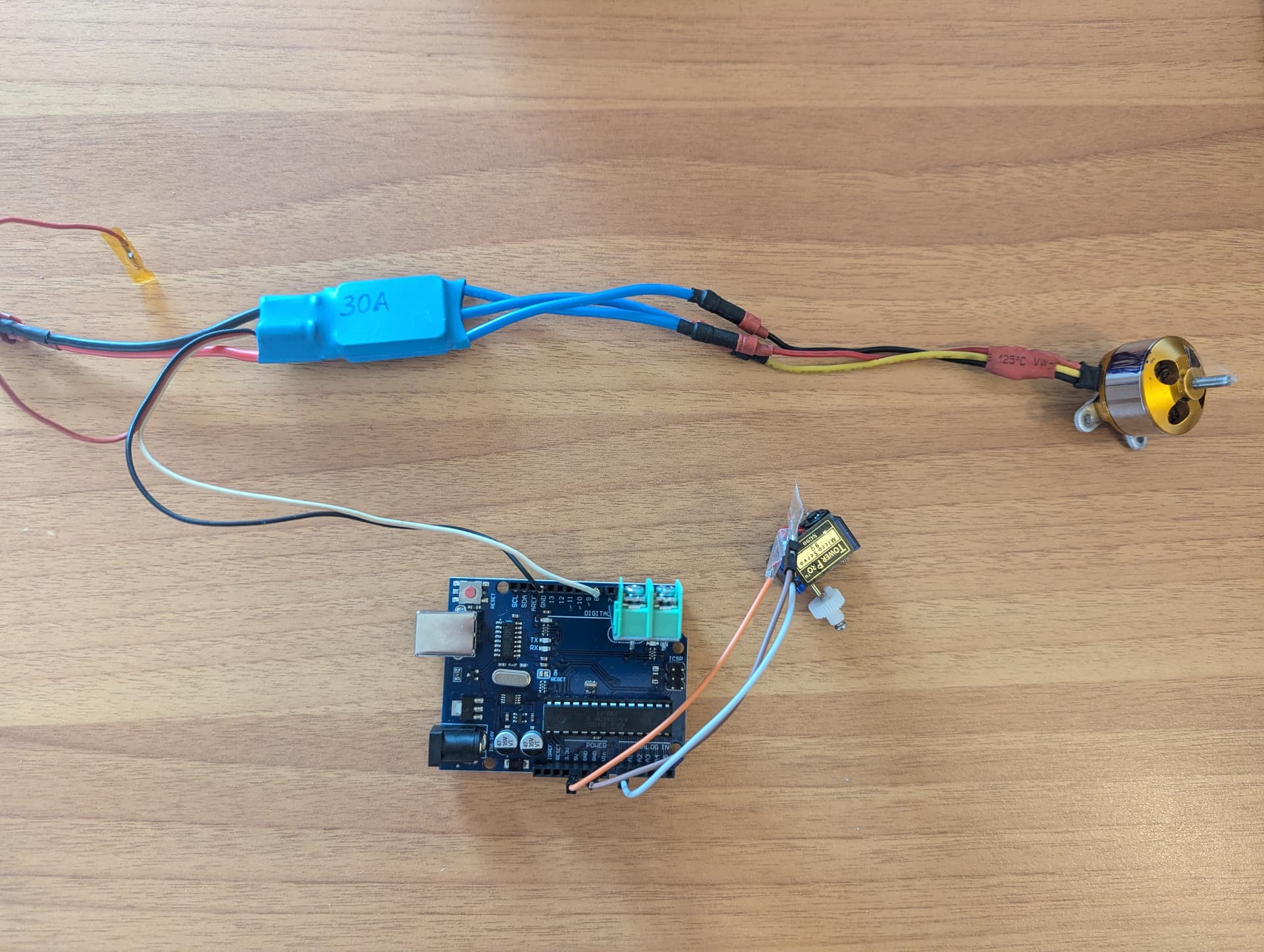
- Arduino Uno R3
- MAX 6675 K
- SSR 40A - 220V
- Brushless ESC - 30A
- Brushless FAN (2200kv - 12V which is used in RC Airplanes)
On the web I found a code that allows me to see the temperature with Artisan and manage the heating resistance with the SSR relay.
Later I added another code to control the fan but only with a 10K potentiometer.
My request is the following, what code do I have to add to also manage the Brushless Fan from Artisan? I opted for a brushless motor because I used to do model airplanes and therefore I have it available and also because it has much more power than the brushed motor.
I attach some photos.
#include <max6675.h>
#include <ModbusRtu.h>
#include <Servo.h>
Servo ESC;
// data array for modbus network sharing
uint16_t au16data[16] = {
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, -1
};
/**
Modbus object declaration
u8id : node id = 0 for master, = 1..247 for slave
u8serno : serial port (use 0 for Serial)
u8txenpin : 0 for RS-232 and USB-FTDI
or any pin number > 1 for RS-485
*/
Modbus slave(1, 0, 0); // this is slave @1 and RS-232 or USB-FTDI
// Pins for thermocouple MAX6675
int thermoDO = 6;
int thermoCS = 5;
int thermoCLK = 4;
MAX6675 thermocouple(thermoCLK, thermoCS, thermoDO);
// declare variable for Arduino pin connected to solid state relay (SSR)
int relay = 9;
// declare variables for Arduino pins connected to fan controller (L293N)
int fan = 10; // ENA of L239N
int in1 = 11; // IN1 of L239N
int in2 = 12; // IN1 of L239N
// declare variables for Arduino pins to power MAX6675:
int vccPin = 3; // 5v power of MAX6675
int gndPin = 2; // gnd of MAX6675
// slew rate limitations for fan control
#define SLEW_STEP 10 // increase in steps of 10% for smooth transition
int target = 0;
int current = 0;
int potValue; // value from the analog pin
void slew_fan() { // limit fan speed increases
target = ((au16data[5] / 100.0) * 255);
if ( target < current ) { // ramping down, so check rate
uint8_t delta = current - target;
if ( delta > SLEW_STEP ) // limit the step size
delta = SLEW_STEP;
analogWrite(fan, (current - delta ));
current = current - delta;
}
else if ( target > current ) { // ramping up, so check rate
uint8_t delta = target - current;
if ( delta > SLEW_STEP ) // limit the step size
delta = SLEW_STEP;
//write current fan value for air control
analogWrite(fan, (current + delta ));
current = current + delta;
}
}
void setup() {
slave.begin( 19200); // 19200 baud, 8-bits, even, 1-bit stop
// use Arduino pins
ESC.attach(8,1000,2000);
pinMode(relay, OUTPUT);
pinMode(fan, OUTPUT);
//fan direction can be reversed by interchanging values for in1 and in2
pinMode(in1, OUTPUT); digitalWrite(in1, HIGH);
pinMode(in2, OUTPUT); digitalWrite(in2, LOW);
pinMode(vccPin, OUTPUT); digitalWrite(vccPin, HIGH);
pinMode(gndPin, OUTPUT); digitalWrite(gndPin, LOW);
delay(500);
}
void loop() {
//write current thermocouple value
au16data[2] = ((uint16_t) thermocouple.readCelsius() * 100);
//write current fan value for air control
// analogWrite(fan, (au16data[5] / 100.0) * 255);
slew_fan();
potValue = analogRead(A0); // reads the value of the potentiometer (value between 0 and 1023)
potValue = map(potValue, 0, 1023, 0, 180); // scale it to use it with the servo library (value between 0 and 180)
ESC.write(potValue); // Send the signal to the ESC
//poll modbus registers
slave.poll( au16data, 16 );
// heater control:
digitalWrite(relay, HIGH);
delay(au16data[4] * 10);
digitalWrite(relay, LOW);
delay((100 - au16data[4]) * 10 - 1);
}