Je viens vers vous pour éclairer mes lanternes!
Mon truc c'est la mécanique et je dois avoue que l’électronique c'est nouveau pour moi, mais je m'investi le plus possible!
Voici mon projet: Réaliser un rail motorisé pour les timelapses. Partie méca tout va bien mais pour l'élec ça se complique
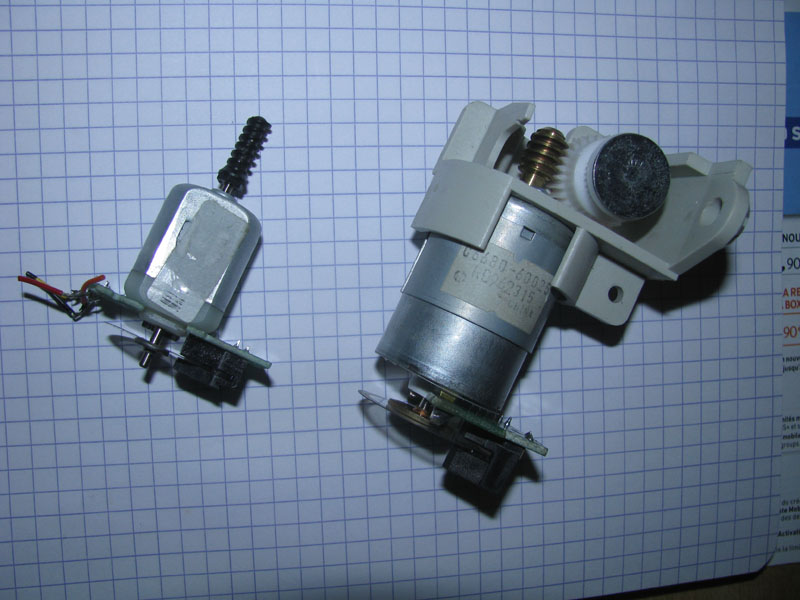
Je possède une carte arduino Uno ainsi qu'un moteur donc voici les caractéristiques:
Alim. 12 V
Régime à charge 110 tr/min
Démultiplication 50:1
Couple (crête) 5.39 Nm
Régime à vide en tension nominale 122 tr/min
Diam. arbres 6 mm
Long. arbre 16.9 mm
Longueur 106 mm
(Ø) 36 mm
Régime permanent 6200 tr/min
Courant en charge max. 0,75 A
Tension nominale 12 V
Courant à vide 0,28 A
J'ai lu tout et son contraire chez mon ami google et je sais plus comment faire! Pont en H, transistor, etc..
Le programme gerrera alimentera le moteur durant x ms puis fera une pause durant y ms, pendant ce temps l'appareil photo fera son travail.
Quelqu'un pour m'aider? :*
Habituellement on utilise des moteurs pas à pas pour ce genre de projets, ça permet des déplacements fins et totalement reproductibles.
Là tu as un moteur à courant continu, les mouvements de marche/arrêt brefs ne seront pas très précis.
As tu besoin d'inverser le sens de rotation ? Dans ce cas le pont en H est bien adapté.
En effet les moteurs pas a pas conviennent mieux mais leur prix pour un couple suffisant m'a vite refroidi
Je pense essayer comme ca et voir si le resultat serait concluant. J'aurais en effet besoin d'inverser le sens, je vais essayer de creuser le sujet des pont en H
Niveau batterie je peux mettre quoi derriere le moteur pour ne pas l'abimer?
Merci!
J'imagine que tu vises le 0 dépenses, ça ne va pas être facile. Un moteur CC va te faire t'arracher les cheveux, car comme le précise Christian, c'est tout sauf précis. sa vitesse dépendra de la charge, du vent... Un petit PAP te permettra de faire bien mieux car tu maîtriseras le déplacement du charriot au mm près, ainsi que sa vitesse. un PAP a beaucoup de couple s'il est bien choisi. tu prends un moteur genre 3 à 5V / 1,5A sur une batterie de 12V avec un driver régulé, le tour est joué. Un PAP classique peut déplacer un charriot de plusieurs Kg, quelles sont les données mécas de ton système?
Pour la batterie, tu peux t'orienter vers une batterie au plomb 12V / 7AH, c'est un modèle très courant, donc pas trop cher. Une batterie de voiture fait tout aussi bien l'affaire, à part le poids (mais ça se recharge très facilement dans ta voiture sur le rajet...).
Ok...
Oui le but est l'economie
Mais je veux pas faire un truc qui ne marchera pas! Un lien vers un moteur pas hors de prix? Je trouve que du tres cher moi
Merci pour votre aide
bonjour
AMHA le timelapse est le cas typique où l'utilisation d'un pont en H hybride est surement une bonne solution :
le taux d'inversion de sens etant tres faible.
l'utilisation d'un moteur CC avec un petit encodeur optique accouplé permet d'obtenir une precision de depacement/positionnement surement tres acceptable.
ça necessite 3 I/O sur un arduino : 2 O pour le sens et le PWM , 1 pour l'entree d'encodeur (pas besoin d'utiliser de la quadrature ici)
si tu es un peu bricoleur et recuperateur ça te reviendra à quasi rien.
Merci pour vos reactions
Etant donné que j'aimerais aussi pourquoi pas faire du travelling video, je vais opter pour la 1ere solution, avec le moteur que je possede deja, et pourquoi pas rajouter un codeur optique si le resultat n'est pas a la hauteur de mes esperances.
Du coup, comment piloter ce moteur avec mon arduino?
Merci
Lecastor:
Merci pour vos reactions
Etant donné que j'aimerais aussi pourquoi pas faire du travelling video, je vais opter pour la 1ere solution, avec le moteur que je possede deja, et pourquoi pas rajouter un codeur optique si le resultat n'est pas a la hauteur de mes esperances.
Du coup, comment piloter ce moteur avec mon arduino?
Merci
Des emmerdes en moins: le câblage est fait sans erreur, le radiateur est monté, les diodes de protection sont présentes...etc ......
Les deux rangées du L298 sont décalées d'un demi pas (1,27mm) --> pas simple à monter sur une breadboard ou de la plaquette pastillée qui sont toutes deux avec des pas entiers (2,54 mm).
Un coût de revient total moins élevé (circuit imprimé compris) que si tu approvisionnai l'ensemble des composants car pour les cartes toute faite les composants ne sont pas achetés à l'unité mais par 10.000 ou plus.
Milles excuses si je n'ai pas le droit de mettre des liens commerciaux, je ne sais pas torp
tu prend un des rouges le moins cher
les differences de prix s'expliquent par le meme phenomene (fabrication masse et prix negociés)
pour les liens ce sont les liens ebay qui sont proscrits à cause de leur durée de vie
Tout en sachant que je veux détecter quand l'axe aura effectué un tour, je n'ai pas besoin de plus de précision vu que j'avance 1mm/tour. ça irait?
ce n'est pas un encodeur optique, c'est un encodeur rotatif mecanique
mais meme si ce n'est pas ce que j'utiliserais, c'est quand meme assez facilement interfacable
tu aura 20 impulsions par tour, à toi de voir la demultiplication employée.
attention aussi à la durée de vie des contacts
perso je mettrais un moto-encodeur optique comme on en recupere denas les imprimantes HS
ex un petit moteur + encodeur et un déjà plus costaud avec demultiplicatio et encodeur
Les imprimantes jet d'encre couleur sont intéressantes : il y a un moteur CC très balaise qui tourne pas vite, et sans démultiplication, il entraîne le charriot, alors avec une démul, tu peux y aller! avec un peu de chance, tu pourras même récupérer le driver qui va avec...
et tout ça pour rien si tu as accès à une bonne déchetterie!
Lecastor:
Tout en sachant que je veux détecter quand l'axe aura effectué un tour, je n'ai pas besoin de plus de précision vu que j'avance 1mm/tour. ça irait?
retour sur ça
si tu n'a besoin que de detecter "le tour" une simple fourche opto bien posée dans la chaine mecanique fera l'affaire
Si j'ai bien compris, tu pars sur une tige filetée de 6mm... donc mettre une rondelle fendue dessus qui passe dans une fourche optique sera très simple (ça se trouve en pagaille dans les imprimantes...)
Sans indiscretion, quel est réellement ton projet? car si ton charriot ne va pas plus vite que 11mm/min, il va t'en falloir du temps pour te déplacer...