Mil disculpas, este es el codigo que estoy probando:
#include <Wire.h>
#include "RTClib.h"
#include <RGBmatrixPanel.h>
#define CLK 11 // USE THIS ON ARDUINO MEGA
#define OE 9
#define LAT 10
#define A A0
#define B A1
#define C A2
#define D A3
#define E A5
RGBmatrixPanel matrix(A, B, C, D, CLK, LAT, OE, false, 64);
#define MATRIX_HEIGHT 64
#define MATRIX_WIDTH 64
#define LED_BLACK 0
#define LED_RED_VERYLOW (3 << 11)
#define LED_RED_LOW (7 << 11)
#define LED_RED_MEDIUM (15 << 11)
#define LED_RED_HIGH (31 << 11)
#define LED_GREEN_VERYLOW (1 << 5)
#define LED_GREEN_LOW (15 << 5)
#define LED_GREEN_MEDIUM (31 << 5)
#define LED_GREEN_HIGH (63 << 5)
#define LED_BLUE_VERYLOW 3
#define LED_BLUE_LOW 7
#define LED_BLUE_MEDIUM 15
#define LED_BLUE_HIGH 31
#define LED_ORANGE_VERYLOW (LED_RED_VERYLOW + LED_GREEN_VERYLOW)
#define LED_ORANGE_LOW (LED_RED_LOW + LED_GREEN_LOW)
#define LED_ORANGE_MEDIUM (LED_RED_MEDIUM + LED_GREEN_MEDIUM)
#define LED_ORANGE_HIGH (LED_RED_HIGH + LED_GREEN_HIGH)
#define LED_PURPLE_VERYLOW (LED_RED_VERYLOW + LED_BLUE_VERYLOW)
#define LED_PURPLE_LOW (LED_RED_LOW + LED_BLUE_LOW)
#define LED_PURPLE_MEDIUM (LED_RED_MEDIUM + LED_BLUE_MEDIUM)
#define LED_PURPLE_HIGH (LED_RED_HIGH + LED_BLUE_HIGH)
#define LED_CYAN_VERYLOW (LED_GREEN_VERYLOW + LED_BLUE_VERYLOW)
#define LED_CYAN_LOW (LED_GREEN_LOW + LED_BLUE_LOW)
#define LED_CYAN_MEDIUM (LED_GREEN_MEDIUM + LED_BLUE_MEDIUM)
#define LED_CYAN_HIGH (LED_GREEN_HIGH + LED_BLUE_HIGH)
#define LED_WHITE_VERYLOW (LED_RED_VERYLOW + LED_GREEN_VERYLOW + LED_BLUE_VERYLOW)
#define LED_WHITE_LOW (LED_RED_LOW + LED_GREEN_LOW + LED_BLUE_LOW)
#define LED_WHITE_MEDIUM (LED_RED_MEDIUM + LED_GREEN_MEDIUM + LED_BLUE_MEDIUM)
#define LED_WHITE_HIGH (LED_RED_HIGH + LED_GREEN_HIGH + LED_BLUE_HIGH)
#define clear() fillScreen(0)
#define show() swapBuffers(true)
#define Color(x,y,z) Color888(x,y,z)
RTC_DS3231 rtc;
#include <NewPing.h>
#define TRIGGER_PIN A10 // Arduino pin tied to trigger pin on the ultrasonic sensor.
#define ECHO_PIN A11 // Arduino pin tied to echo pin on the ultrasonic sensor.
#define MAX_DISTANCE 250 // Maximum distance we want to ping for (in centimeters). Maximum sensor distance is rated at 400-500cm.
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // NewPing setup of pins and maximum distance.
// variables para almacenar la hora desde el gsm
char c1, c2, c3, c4, c5, c6, c7, c8, c9, c10, c11, c12;
int hora = 0;
int minuto = 0;
int segundo = 0;
int pulsador = A8;
int estado = 0;
int igualar = A9;
int estado_igualar = 0;
int indicador = 0;
byte second, minute, hour;
int fix = 0;
long horas = 0;
long minutos = 0;
long segundos = 0;
long decimales = 0;
long previousMillis = 0; // will store last time LED was updated
long interval = 2000; // interval at which to blink (milliseconds)
long d; //distancia en centimetros
int control = 0;
int encendido = 4;
////////////////////////////////////////////////////
unsigned long startMillis; //some global variables available anywhere in the program
unsigned long currentMillis;
const unsigned long period = 1000; //the value is a number of milliseconds
void setup() {
Serial.begin(9600);
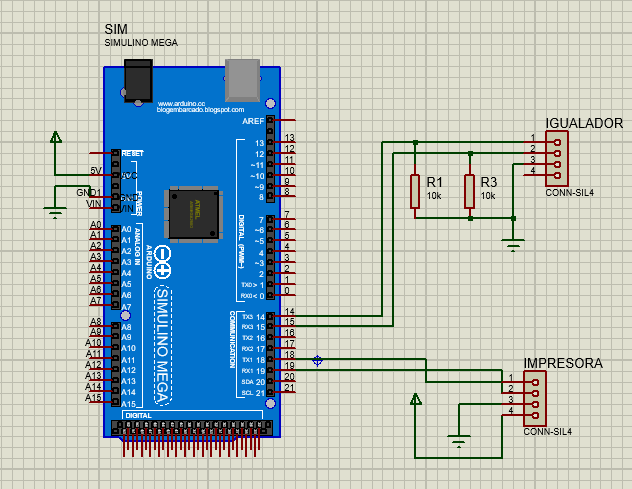
Serial1.begin(115200); // IMPRESORA
Serial3.begin(9600); // IGUALADOR
// inicializar el Serial a los pines
matrix.begin();
// draw some text!
matrix.setTextSize(1); // size 1 == 8 pixels high
matrix.setTextWrap(false); // Don't wrap at end of line - will do ourselves
matrix.setCursor(0, 0); // start at top left, with 8 pixel of spacing
pinMode(TRIGGER_PIN, OUTPUT);
pinMode(ECHO_PIN, INPUT);
rtc.begin();
if (rtc.lostPower()) {
Serial.println("RTC lost power, lets set the time!");
// following line sets the RTC to the date & time this sketch was compiled
rtc.adjust(DateTime(F(__DATE__), F(__TIME__)));
// This line sets the RTC with an explicit date & time, for example to set
// January 21, 2014 at 3am you would call:
// rtc.adjust(DateTime(2018, 4, 16, 10, 58, 20));
}
pinMode(pulsador, INPUT);
pinMode(igualar, INPUT);
pinMode(encendido, OUTPUT);
startMillis = millis(); //initial start time
}
void loop() {
rtc.begin();
estado = digitalRead(pulsador);
estado_igualar = digitalRead(igualar);
DateTime now = rtc.now();
hour = now.hour();
minute = now.minute();
second = now.second();
Serial.print(hour);
Serial.print(":");
Serial.print(minute);
Serial.print(":");
Serial.println(second);
Serial.print("estado_conteo: ");
Serial.println(estado);
Serial.print("estado_igualar: ");
Serial.println(estado_igualar);
if (estado == HIGH) {
runClock();
}
if (estado == LOW) {
conteo();
}
if (Serial3.available() > 0) {
hora = Serial3.parseInt();
minuto = Serial3.parseInt();
segundo = Serial3.parseInt();
Serial.print(hora);
Serial.print(":");
Serial.print(minuto);
Serial.print(":");
Serial.print(segundo);
Serial.println();
segundo = segundo + 2;
if (hora != 0 && minuto != 0 && segundo != 0 ) {
if (hora < 23 && minuto < 59 && segundo < 59 ) {
rtc.adjust(DateTime(2018, 11, 11, hora, minuto, segundo));
rtc.begin();
}
}
}
}
void runClock()
{
DateTime now = rtc.now();
hour = now.hour();
minute = now.minute();
second = now.second();
horas = now.hour();
minutos = now.minute();
segundos = now.second();
currentMillis = millis();
if (currentMillis - startMillis >= period)
{
matrix.clear();
matrix.setTextSize(1.9);
matrix.setRotation(0);
matrix.setTextColor(LED_CYAN_HIGH);
matrix.setCursor(0, 10);
matrix.print(horas);
matrix.print(":");
matrix.print(minutos);
matrix.setTextSize(2);
matrix.setCursor(35, 9);
if (segundos < 10) {
matrix.print('0');
}
matrix.print(segundos);
startMillis = currentMillis;
}
}
void conteo()
{
DateTime now = rtc.now();
hour = now.hour();
minute = now.minute();
second = now.second();
horas = now.hour();
minutos = now.minute();
segundos = now.second();
// draw a pixel in solid white
matrix.fillRect(28, 30, 4, 4, matrix.Color888(255, 255, 255));
d = sonar.ping_cm();
if (d == 0) {
d = 500;
}
currentMillis = millis(); //get the current "time" (actually the number of milliseconds since the program started)
if (currentMillis - startMillis >= period) //test whether the period has elapsed
{
if (segundos <= 59) //Stop
{
matrix.clear();
matrix.setTextSize(1.9); //
matrix.setRotation(0);
matrix.setTextColor(LED_CYAN_HIGH);
matrix.setCursor(0, 10);
matrix.print(horas);
matrix.print(":");
matrix.print(minutos);
matrix.setTextSize(2);
matrix.setCursor(35, 9);
if (segundos < 10) {
matrix.print('0');
}
matrix.print(segundos);
startMillis = currentMillis;
if (d < 200) {
if (control == 0) {
horas = now.hour();
minutos = now.minute();
segundos = now.second();
Serial1.print("Su tiempo es: ");
Serial1.write(10);
if (horas < 10) {
Serial1.print('0');
}
Serial1.print(horas); // Horas
Serial1.print(':');
if (minutos < 10) {
Serial1.print('0');
}
Serial1.print(minutos); // Minutos
Serial1.print(':');
if (segundos < 10) {
Serial1.print('0');
}
Serial1.print(segundos); // Segundos
Serial1.write(10);
Serial1.write(10);
control = 1;
}
}
}
}
}
La idea es que el panel tiene dos modos de trabajo:
- En runClock(); funciona como un reloj comun y silvestre.
- En conteo(); mediante un sensor de ultrasonido detecta si algo cruzó el sensor y envía ese tiempo a la impresora bluetooth.
Aclaro que todo esto funciona correctamente, el problema lo tengo cuando habilito la conexión serial para igualar la hora del reloj que se me presenta el problema que el ruido en el puerto serial congela el display y los segundos se quedan colgados por x tiempo y luego vuelve a trabajar normalmente.