Hi, I'm a sophomore in high school, amateur in this field. Two students and I organized a team, and we are progressing a R&E project (researching and writing an essay).
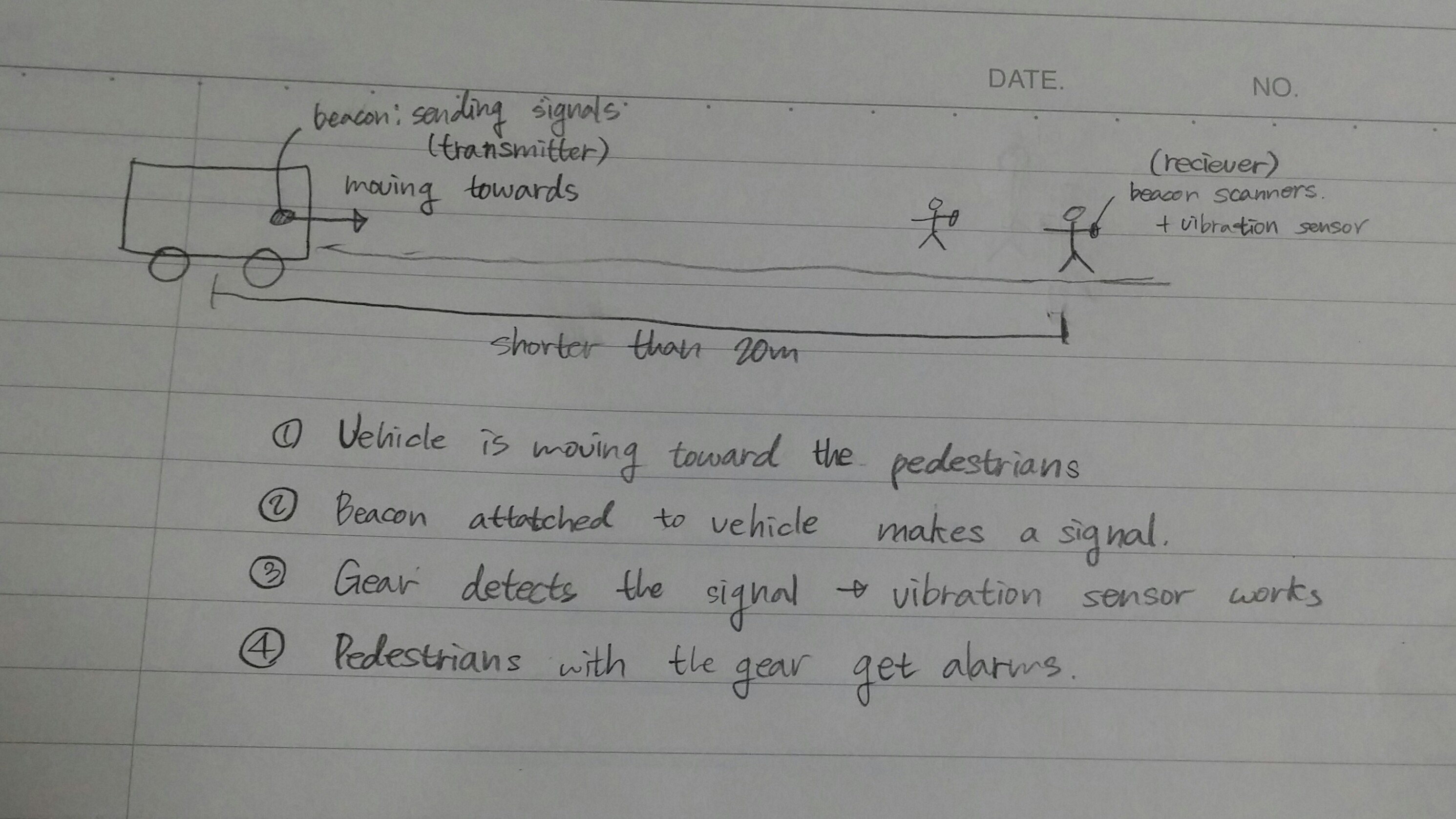
In our project, we are trying to make a system which warns incautious pedestrians, protecting them from potential risks. As a vehicle (Beacon attatched) approaches the pedestrian, the Beacon scanner detects it. Once the signal is detected, vibration sensor works and the pedestrian indicates the danger.
(Refer to image)
Our final output should be a small gear which can be put on a person's wrist. Yet we are not going to make that gear; we will only finish the circuit.
What we want to do is:
-
Set the Beacon to send a signal only when the vehicle is moving (transmitter)
To solve this matter, we came out of an idea of connecting the Beacon with acceleration sensor using arduino. -
Connecting Beacon scanner with vibration sensor & making a simple program for these sequences (reciever)
Since we are non-specialists (probably the first time to be informed), we are having difficulty in selecting arduino model, and figuring out how we could make this circuit. Can you recommend us some appropriate arduino models, and give advices on designing these circuits? We would really appreciate your help. Thank you ![]()