Hi everyone,
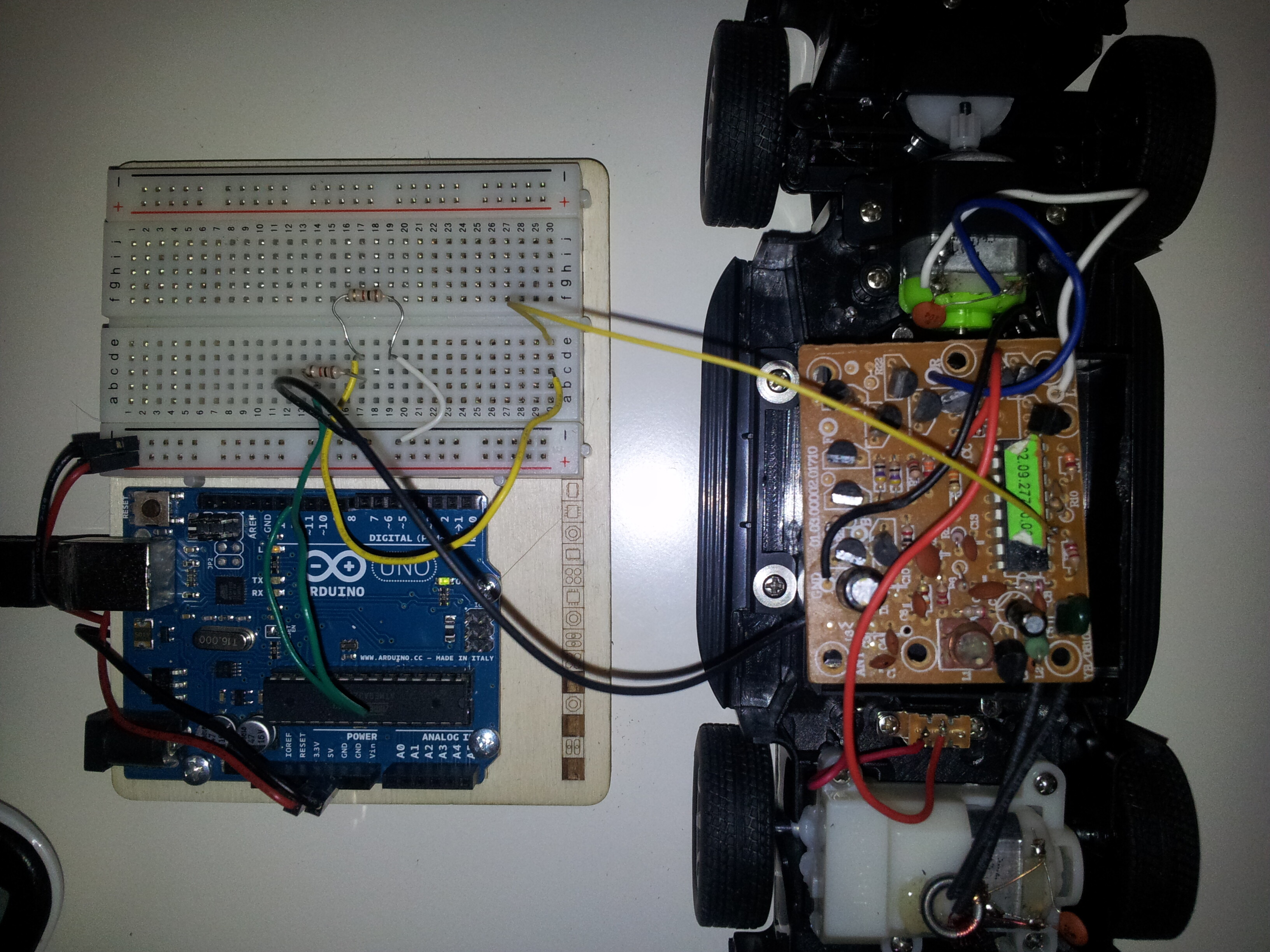
I bought a cheap Chinese toy car and it has the famous TX2/RX2 chip combo. What I would like to do is get rid off the TX2 transmitter (the remote) and control the RX2 chip in the car with an Arduino.
I know the easiest solution is to simply hook up the Arduino to the RX2 H-Bridge pins and write HIGH, LOW to control the driving and steering movements as explained in this tutorial (http://letsmakerobots.com/node/31757). This is OK, but I want to be able to generate the same pulse signals the TX2 transmitter (remote) is sending to the RX2 (car) receiver directly with the Arduino. The RX2 has a signal input pin (Pin 3 usually on RX2 chips). With the right programming it should be possible to PWM the right combination of pulses from the Arduino to that signal input pin of the RX2 chip to signal movements like forward, backwards, etc.
I have a datasheet here for the RealTek RX2/TX2 chip. On page 4 you can see the data format (pulse signals) the RX2 chip understands.
http://www.jbprojects.net/projects/wifirobot/TX2RX2.doc
W2 W2 W2 W2 (n) x W1 W2 W2 W2 W2 (n) x W1 W2 W2 W2 W2
Number of Function Codes (n) W1 | Function Key
4 End Code
10 Forward
16 Forward & Turbo
22 Turbo
28 Turbo & Forward & Left
34 Turbo & Forward & Right
40 Backward
46 Backward & Right
52 Backward & Left
58 Left
64 Right
The W2 are 500 Hz at 75% duty cycle
The W1 are 1KHz at 50% duty cycle.
The W1 pulses are the function code, so for example 10 W1 pulses will cause a forward movement, 58 W1 pulses activate left steering. The W2 pulses seem to be Start and End commands before and after the W1 pulses.
Has anyone ever done something like this? If not, wouldn't it be cool to figure this out and get it documented? Think about it, this method would allow Arduino to RC car communication using only one pin from the Arduino going to a single signal input pin on the RX2 receiver chip. No need to hook up 4 to 5 pins from the Arduino to the RX2 H-Bridge's forward, backward, left, right, turbo pins to control movements.
This would be a fun project and only requires a $5 US cheap Chinese toy car you can find in any store.
Who is up for the challenge? 8)