Ciao a tutti!
Sto lavorando a un progetto personale che richiede estrema precisione nel tempo: devo far ruotare l’albero di un motore stepper di un solo giro ogni 30 minuti. Un movimento lentissimo ma costante e affidabile, attivo 24 ore su 24, alimentato da una presa domestica (bipasso).
Prima di acquistare tutto il necessario, vorrei confrontarmi con voi per chiarire alcuni dubbi tecnici.
Allego uno schema del sistema che vorrei realizzare.
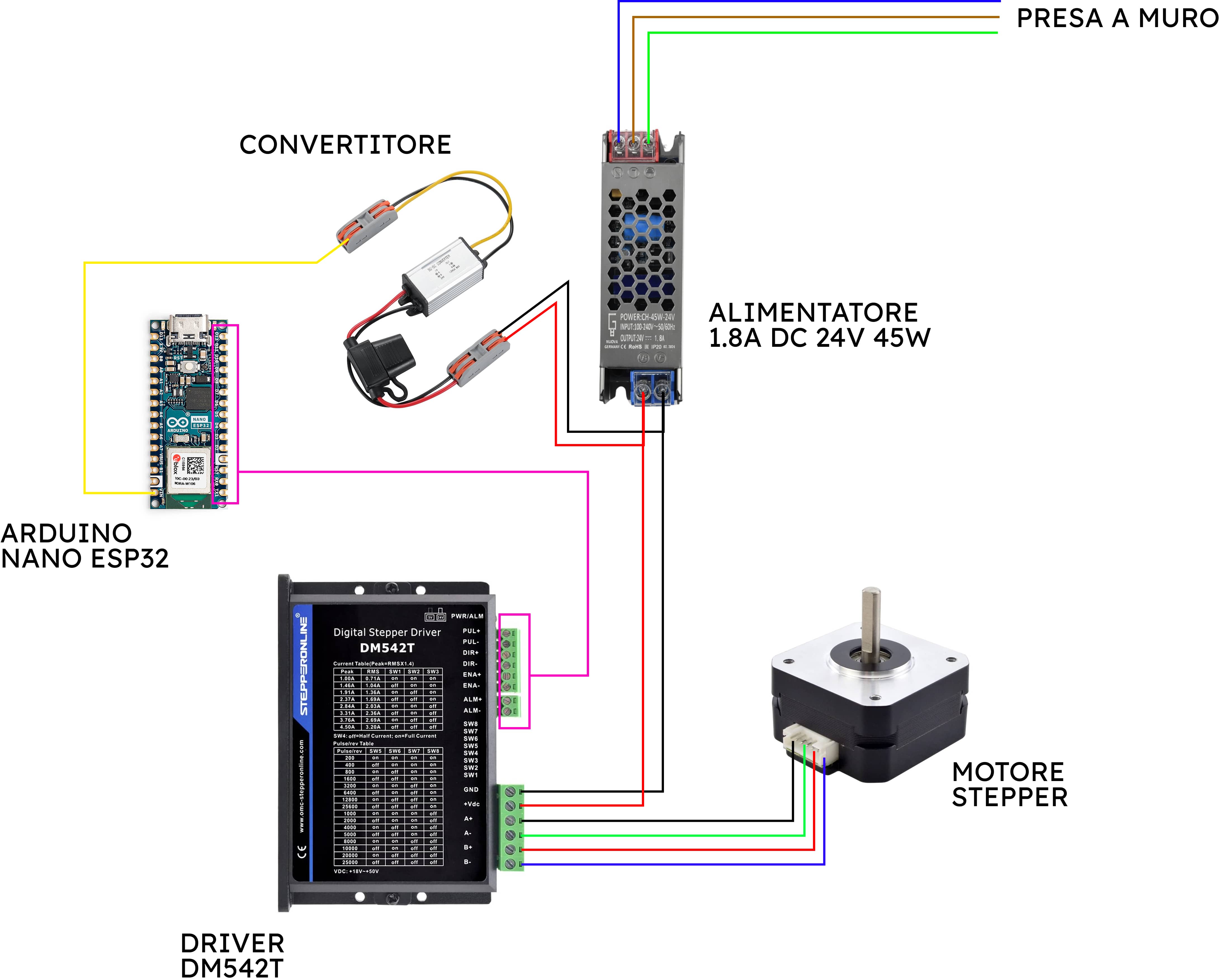
Componenti previsti:
-
Motore stepper NEMA 17:
Link Amazon – scheda tecnica:
17HE08-1004S.pdf (117,6 KB) -
Driver DM542T:
Link Amazon – manuale utente:
DM542T_V4.0.pdf (861,3 KB) -
Alimentatore 24V 1.8A:
Link Amazon -
Convertitore 24V → 12V 5A:
Link Amazon -
Arduino Nano ESP32:
Link Arduino Store
Arduino Nano ESP32
L’ho scelta per il basso consumo e la connettività Wi-Fi, utile per espandere il progetto in futuro.
Mi sembra compatibile col driver; le connessioni e il codice le gestirò senza librerie, dato che la logica è semplice: 1 giro ogni 30 minuti.
Dubbio principale: vorrei alimentare direttamente la scheda dall’alimentatore (via convertitore 24V → 12V 5A per evitare di danneggiare la scheda) così da tenere la porta USB libera per la programmazione.
Domande:
- L’uso del convertitore è corretto o superfluo?
- Il modello del convertitore scelto va bene?
- Lo schema è migliorabile?
Alimentatore
Tenendo conto dell’intero sistema, l'alimentatore che ho individuato è sufficiente?
Grazie in anticipo per i vostri consigli!
Ogni feedback è benvenuto ![]()
