hallö liebe helfenden ;D
ich habe mir einen sog. Nurflügler gebaut, ihn mit einem Pixhawk (Flugcontroller) bestückt und bin damit ziemlich zufrieden.
mein Problem ist nur das o.g. Flugmodell kein ruder, welches für die "links - rechts Lenkung" in der luft zuständig ist, hat.
nun dachte ich mir Arduino, jawoll..., kann doch nicht so schwer sein.
nur habe ich einen code gefunden der als "V-Tail mixer" erstellt wurde und als solcher auch wunderbar funktioniert.
ich möchte diesen umschreiben, hab auch ziemlich viel davon in erfahrung bringen können, was was bedeutet trotzdem sind einige fragen doch ungeklärt geblieben.
ich weiß wie das mit der "interrupt" funktion funktioniert und wie/wo welche signale ausgegeben werden
nun stellt sich mir die frage was genau diese zeilen im einzelnen zu bedeuten haben:
volatile double Chan1_val, Chan2_val = 1500;
volatile double Chan1_val_last, Chan2_val_last = 1500;
warum sind die chan_1 und chan_2 value auf 1500 festgelegt? und welchen zweck hat dies?
double reverse(double val) {
return (val-1500) * -1 + 1500;
}
double add(double val1, double val2) {
double out = (val1 -1500 + val2 -1500) + 1500;
out = (out < 1000) ? 1000 : out;
out = (out > 2000) ? 2000 : out;
return out;
}
void serviceServos(long pFrameCounter) {
// do the v-tail mixing
double left = add(Chan2_val, Chan1_val);
double right = add(reverse(Chan2_val), Chan1_val);
ServoArray[0].writeMicroseconds(left);
ServoArray[1].writeMicroseconds(right);
das soll dieses v-tail mixing berechnen. aber was ist davon was? kann mir jemand erklären was davon welche funktion hat ich habe viel gelesen aber ich komm auch mittlerweile durch das arduino Learning nicht weiter.
hier nochmal der ganze code:
/**
PPM V-Tail/elevon mixer
Input pins:
2: aileron/rudder
3: elevator
Output pins:
9: servo left
10: servo right
*/
#include <math.h>
#include <Servo.h>
//#define DEBUG
#define START_OUTPUT_PIN 9
int Chan1Interrupt = 0; // pin 2, aileron
int Chan2Interrupt = 1; // pin 3, elevator
unsigned long Chan1_startPulse, Chan2_startPulse;
volatile double Chan1_val, Chan2_val = 1500;
volatile double Chan1_val_last, Chan2_val_last = 1500;
long StartMillis=0;
long FrameCounter=0;
Servo ServoArray[2];
double reverse(double val) {
return (val-1500) * -1 + 1500;
}
double add(double val1, double val2) {
double out = (val1 -1500 + val2 -1500) + 1500;
out = (out < 1000) ? 1000 : out;
out = (out > 2000) ? 2000 : out;
return out;
}
void serviceServos(long pFrameCounter) {
// do the v-tail mixing
double left = add(Chan2_val, Chan1_val);
double right = add(reverse(Chan2_val), Chan1_val);
ServoArray[0].writeMicroseconds(left);
ServoArray[1].writeMicroseconds(right);
}
void setup() {
attachInterrupt(Chan1Interrupt, Chan1_begin, RISING);
attachInterrupt(Chan2Interrupt, Chan2_begin, RISING);
ServoArray[0].attach(START_OUTPUT_PIN+0, 900, 2100); // aileron
ServoArray[1].attach(START_OUTPUT_PIN+1, 900, 2100); // elevator
StartMillis = millis();
#ifdef DEBUG
Serial.begin(115200);
#endif
}
void loop() {
long LocalMillis;
long LocalFrameCounter;
LocalMillis = millis();
LocalFrameCounter = (LocalMillis - StartMillis) / 20;
if (LocalFrameCounter > FrameCounter) {
FrameCounter = LocalFrameCounter;
serviceServos(FrameCounter);
}
}
void Chan1_begin() {
Chan1_startPulse = micros();
detachInterrupt(Chan1Interrupt);
attachInterrupt(Chan1Interrupt, Chan1_end, FALLING);
}
void Chan1_end() {
Chan1_val = micros() - Chan1_startPulse;
detachInterrupt(Chan1Interrupt);
attachInterrupt(Chan1Interrupt, Chan1_begin, RISING);
if (Chan1_val < 1000 || Chan1_val > 2000) {
Chan1_val = Chan1_val_last;
} else {
Chan1_val_last = Chan1_val;
}
}
void Chan2_begin() {
Chan2_startPulse = micros();
detachInterrupt(Chan2Interrupt);
attachInterrupt(Chan2Interrupt, Chan2_end, FALLING);
}
void Chan2_end() {
Chan2_val = micros() - Chan2_startPulse;
detachInterrupt(Chan2Interrupt);
attachInterrupt(Chan2Interrupt, Chan2_begin, RISING);
if (Chan2_val < 1000 || Chan2_val > 2000) {
Chan2_val = Chan2_val_last;
} else {
Chan2_val_last = Chan2_val;
}
}
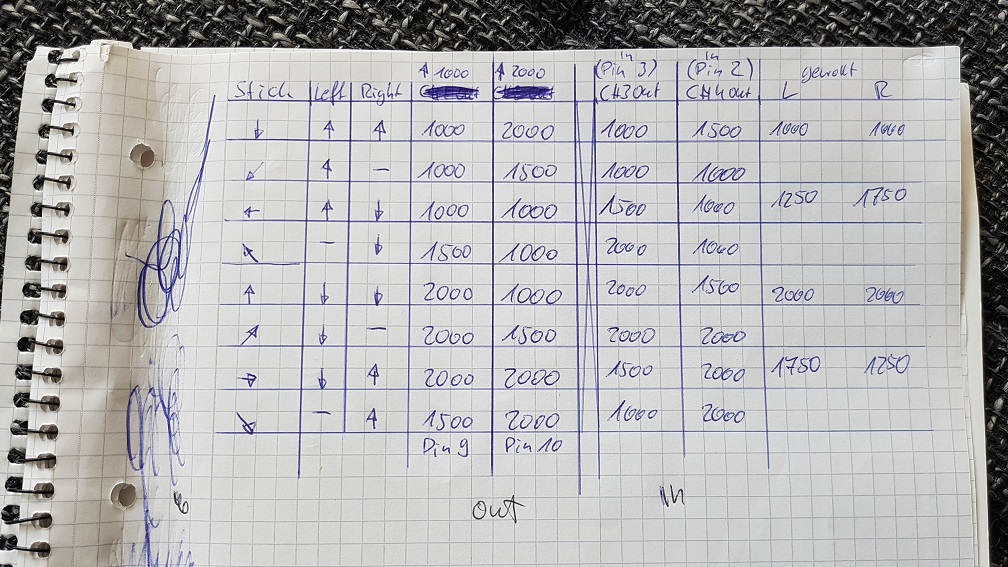
als anhang ist ein bild was der rc stick tut und was die servos tun
- Spalte: Knüppelstellung vom sender
- Spalte: Stellung linkes servo
- Spalte: Stellung rechtes servo
- Spalte: ausgangspuls in Millisekunden linkes servo
- Spalte: ausgangspuls in Millisekunden rechtes servo
- Spalte: Eingangspuls in Millisekunden arduino pin 3
- Spalte: Eingangspuls in Millisekunden arduino pin 2
- Spalte gewollter Ausgangspuls arduino pin 9
- Spalte gewollter Ausgangspuls arduino pin 10