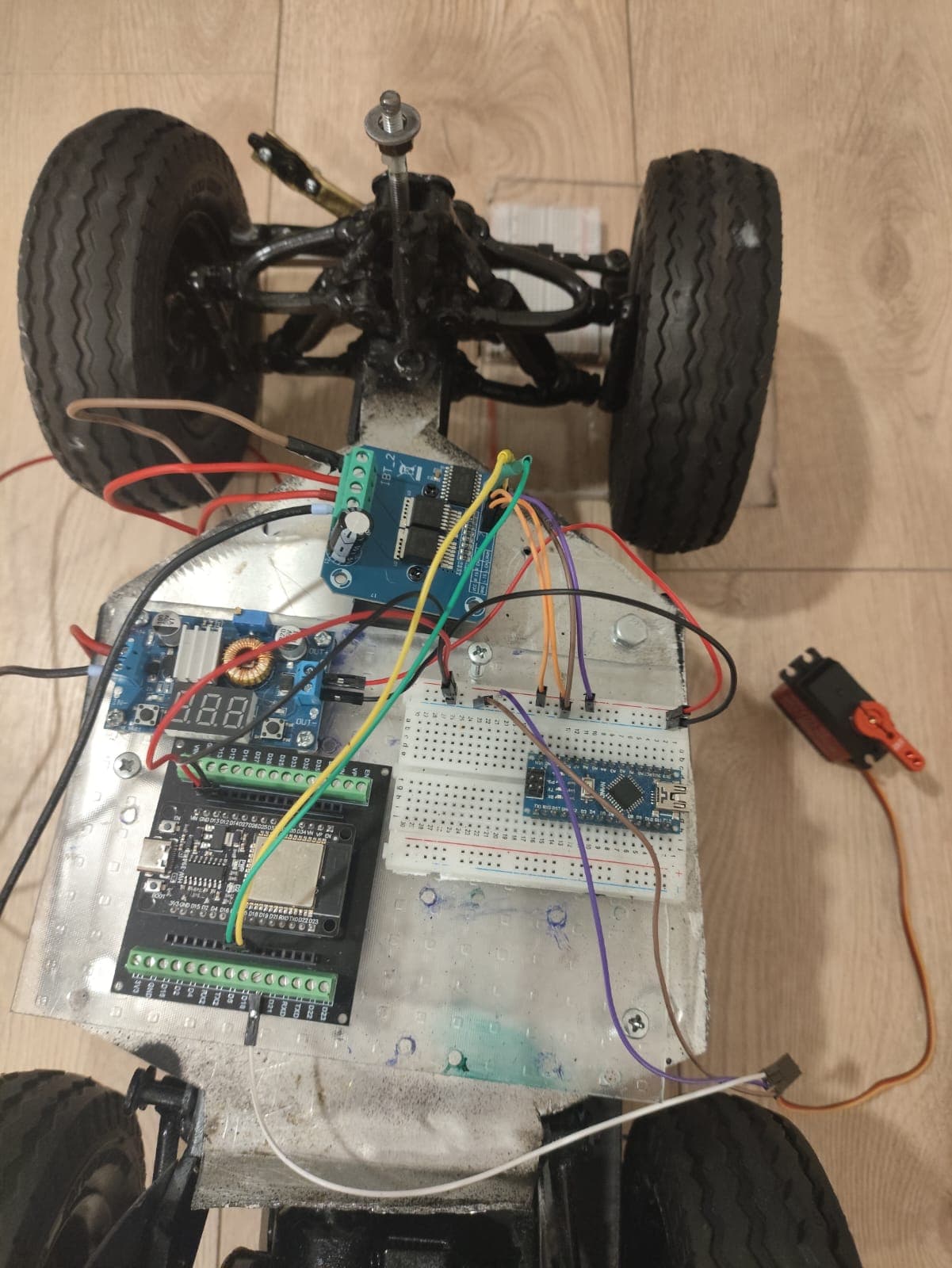
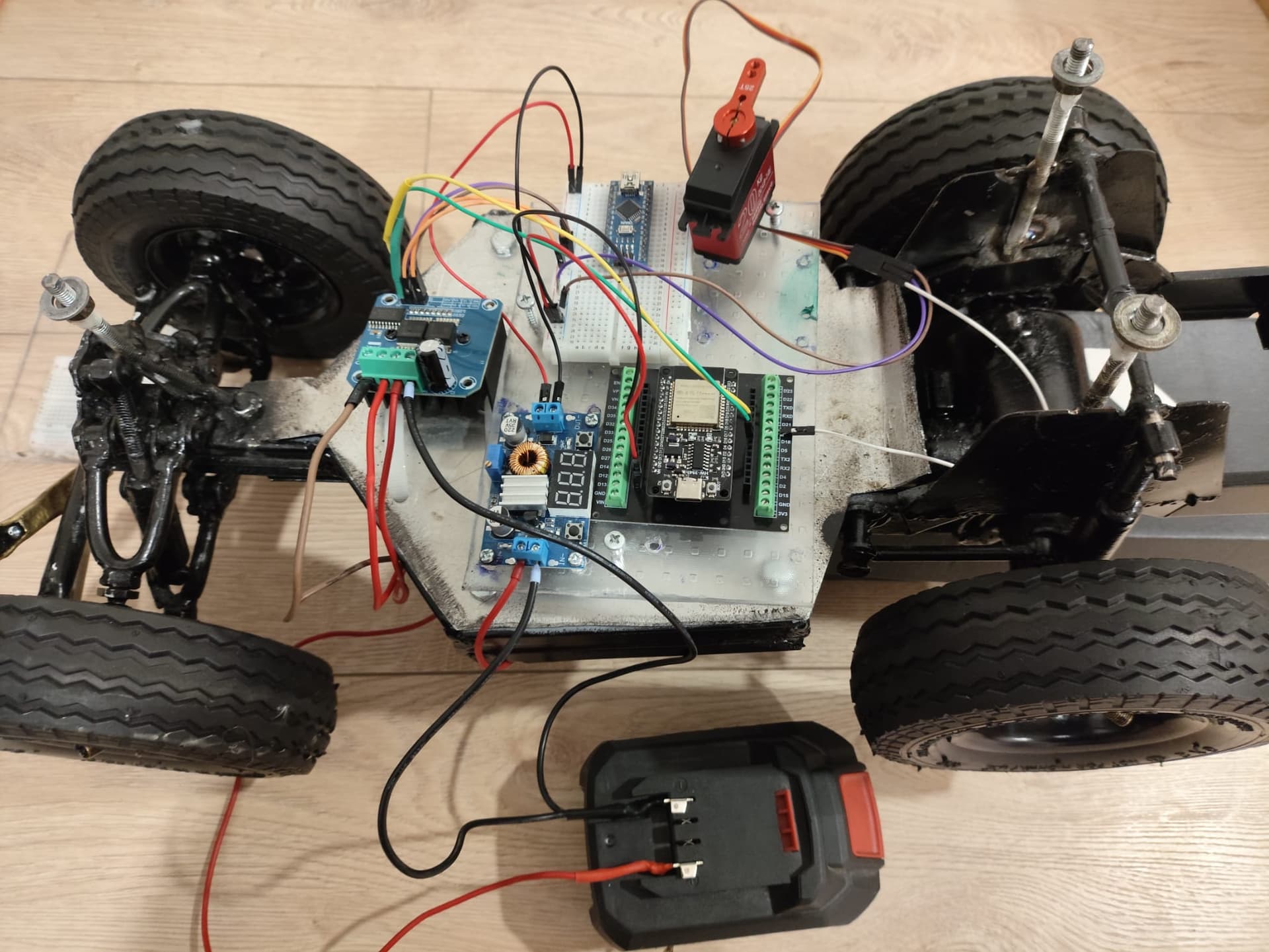
Wiring diagram:
The full code:
#include <BluetoothSerial.h>
#include <ESP32Servo.h>
#include "driver/ledc.h"
#include <Arduino.h>
BluetoothSerial SerialBT;
#define IN1 5 // Motor
#define IN2 18 // Motor
#define SERVO_PIN 19 // Servo
#define HEADLIGHT_PIN 21 // Farol
#define LEFT_INDICATOR_PIN 22 // Seta esquerda
#define RIGHT_INDICATOR_PIN 23 // Seta direita
#define BRAKE_LIGHT_PIN 26 // Luz de freio
#define HORN_PIN 25 // Buzina
Servo steeringServo;
const int pwmChannel1 = 0;
const int pwmChannel2 = 1;
const int pwmFreq = 5000;
const int pwmResolution = 8;
// Variáveis de controle
bool leftIndicatorOn = false;
bool rightIndicatorOn = false;
bool hazardOn = false;
unsigned long lastBlinkTime = 0;
bool blinkState = false;
// Controle do motor
unsigned long lastMotorCommandTime = 0;
void setup() {
Serial.begin(115200);
SerialBT.begin("ESP32_Carro");
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(HEADLIGHT_PIN, OUTPUT);
pinMode(LEFT_INDICATOR_PIN, OUTPUT);
pinMode(RIGHT_INDICATOR_PIN, OUTPUT);
pinMode(HORN_PIN, OUTPUT);
pinMode(BRAKE_LIGHT_PIN, OUTPUT);
digitalWrite(HEADLIGHT_PIN, LOW);
digitalWrite(LEFT_INDICATOR_PIN, LOW);
digitalWrite(RIGHT_INDICATOR_PIN, LOW);
digitalWrite(HORN_PIN, LOW);
digitalWrite(BRAKE_LIGHT_PIN, HIGH);
steeringServo.attach(SERVO_PIN, 1000, 2000);
steeringServo.write(90); // Centro
ledcSetup(pwmChannel1, pwmFreq, pwmResolution);
ledcSetup(pwmChannel2, pwmFreq, pwmResolution);
ledcAttachPin(IN1, pwmChannel1);
ledcAttachPin(IN2, pwmChannel2);
ledcWrite(pwmChannel1, 0);
ledcWrite(pwmChannel2, 0);
}
void loop() {
if (SerialBT.available()) {
String input = SerialBT.readStringUntil('\n');
input.trim();
Serial.println("Recebido: " + input);
if (input.length() == 6) {
char moveDir = input[0];
int moveSpeed = input.substring(1, 3).toInt();
char steerDir = input[3];
int steerAngle = input.substring(4, 6).toInt();
processMotion(moveDir, moveSpeed, steerDir, steerAngle);
} else if (input.length() == 1) {
processFunction(input[0]);
}
}
// Verifica se parou de receber comandos do motor
if (millis() - lastMotorCommandTime > 500) {
stopMotor();
}
blinkIndicators();
}
void processMotion(char moveDir, int moveSpeed, char steerDir, int steerAngle) {
if (steerDir == 'R' || steerDir == 'L') {
int servoPosition = (steerDir == 'R') ? (90 - steerAngle) : (90 + steerAngle);
steeringServo.write(servoPosition);
}
// Movimento do motor
if (moveDir == 'F' || moveDir == 'B') {
lastMotorCommandTime = millis();
int pwmValue = map(moveSpeed, 0, 99, 0, 255);
if (moveSpeed == 0) {
stopMotor();
} else {
digitalWrite(BRAKE_LIGHT_PIN, LOW);
if (moveDir == 'F') {
ledcWrite(pwmChannel1, pwmValue);
ledcWrite(pwmChannel2, 0);
} else {
ledcWrite(pwmChannel1, 0);
ledcWrite(pwmChannel2, pwmValue);
}
}
}
}
void stopMotor() {
ledcWrite(pwmChannel1, 0);
ledcWrite(pwmChannel2, 0);
digitalWrite(BRAKE_LIGHT_PIN, HIGH);
}
void processFunction(char cmd) {
switch (cmd) {
case 'U': digitalWrite(HEADLIGHT_PIN, HIGH); break;
case 'u': digitalWrite(HEADLIGHT_PIN, LOW); break;
case 'W': leftIndicatorOn = true; hazardOn = false; break;
case 'w': leftIndicatorOn = false; digitalWrite(LEFT_INDICATOR_PIN, LOW); break;
case 'V': rightIndicatorOn = true; hazardOn = false; break;
case 'v': rightIndicatorOn = false; digitalWrite(RIGHT_INDICATOR_PIN, LOW); break;
case 'X': hazardOn = true; leftIndicatorOn = false; rightIndicatorOn = false; break;
case 'x': hazardOn = false; digitalWrite(LEFT_INDICATOR_PIN, LOW); digitalWrite(RIGHT_INDICATOR_PIN, LOW); break;
case 'Y': digitalWrite(HORN_PIN, HIGH); delay(200); digitalWrite(HORN_PIN, LOW); break;
}
}
void blinkIndicators() {
if (millis() - lastBlinkTime >= 500) {
lastBlinkTime = millis();
blinkState = !blinkState;
if (hazardOn) {
digitalWrite(LEFT_INDICATOR_PIN, blinkState);
digitalWrite(RIGHT_INDICATOR_PIN, blinkState);
} else {
digitalWrite(LEFT_INDICATOR_PIN, leftIndicatorOn ? blinkState : LOW);
digitalWrite(RIGHT_INDICATOR_PIN, rightIndicatorOn ? blinkState : LOW);
}
}
}