Hi,
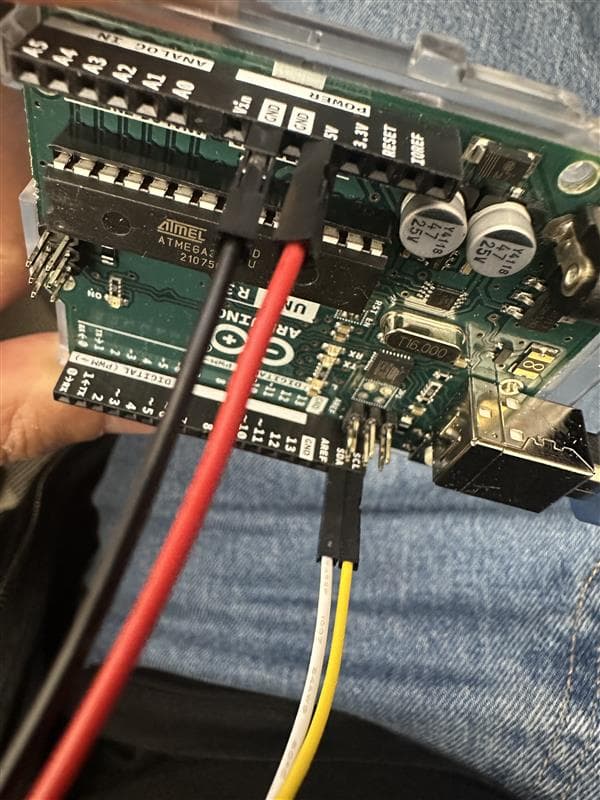
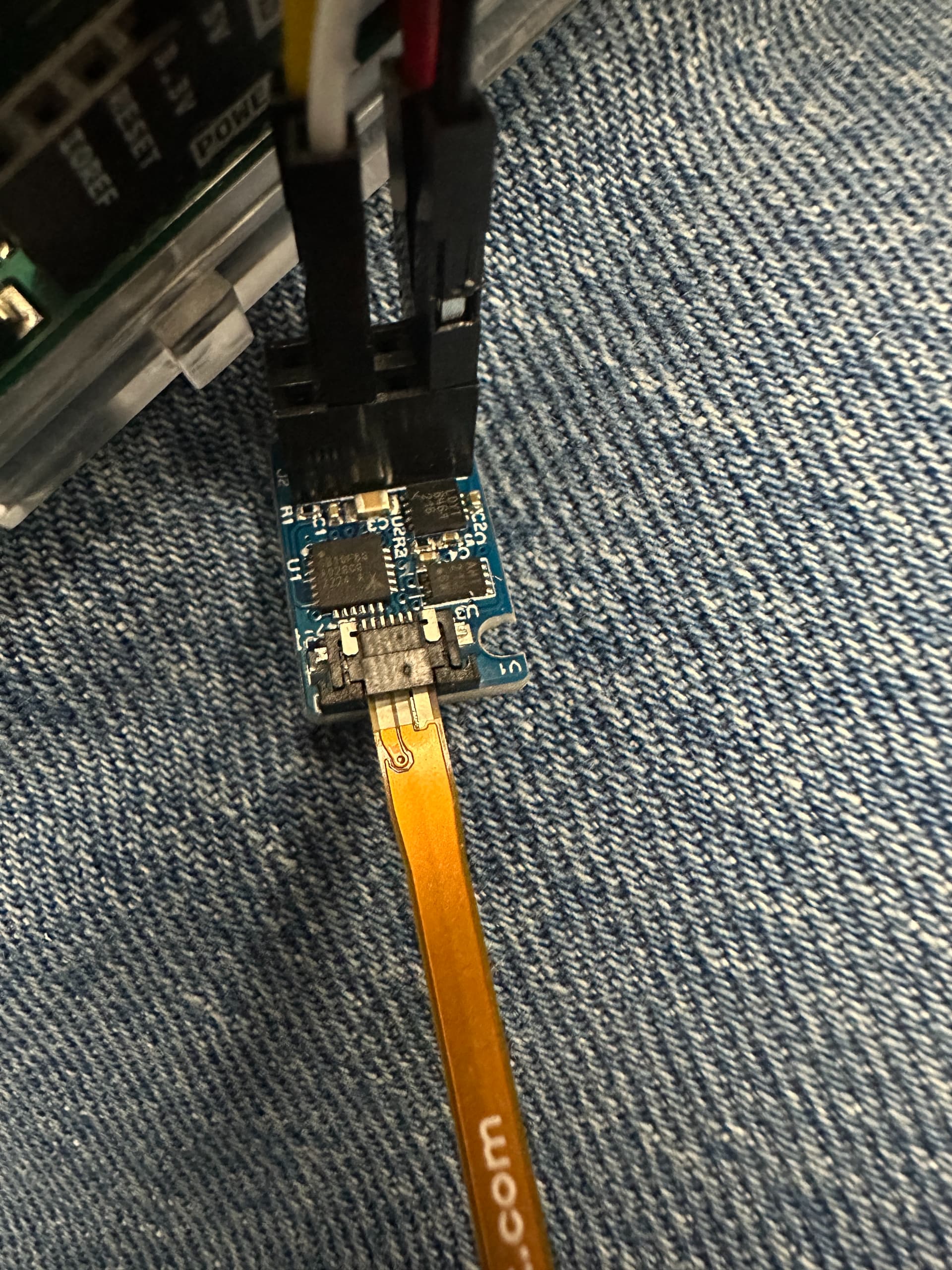
I am trying to connect to a SingleTact Sensor and I am having some trouble getting anything out on the serial monitor. I have connected the sensor relative to their wiring diagram in the quick start guide (Standard Electronics) I have reached out to their support as well and they can't seem to figure out the issue as well. Please help! I'm not sure why it's not working!
//-----------------------------------------------------------------------------
// Copyright (c) 2015 Pressure Profile Systems
//
// Licensed under the MIT license. This file may not be copied, modified, or
// distributed except according to those terms.
//-----------------------------------------------------------------------------
#include <Wire.h> //For I2C/SMBus
#include <Timer1.h> //For timestamp
#define CMD_READ 0x01
#define CMD_WRITE 0x02
#define CMD_TOGGLE_GPIO 0x03
#define CMD_WRITE_CAL 0x04
#define TOGGLE_ALL 0x08
#define TOGGLE_NONE 0x00
//Constants
//General I2C packet structure
const byte I2C_HEADER1 = 0;
const byte I2C_HEADER2 = 1;
const byte I2C_HEADER3 = 2;
const byte I2C_HEADER4 = 3;
const byte I2C_ADDRESS_BYTE = 4;
const byte I2C_TIMOUT_BYTE = 5;
const byte I2C_ID_BYTE = 6;
const byte I2C_NUM_FOOTER_BYTES = 4;
const byte I2C_TO_SENSOR_BUFFER_LENGTH = 32;
const byte I2C_TIMEOUT = 100; //100ms
//From PC
const byte I2C_FROMPC_CMD = 7;
const byte I2C_FROMPC_READWRITE_LOCATION = 8;
const byte I2C_FROMPC_NUM_BYTES_TO_READWRITE = 9;
const byte SERIAL_FROMPC_BUFFER_LENGTH = 43;
const byte MINIMUM_FROMPC_PACKETLENGTH = 13; //I2C_FROMPC_NUM_BYTES_TO_READWRITE + 4 footer bytes
//To PC
const byte I2C_TOPC_TIMESTAMP = 7;
const byte I2C_TOPC_NBYTES = 11;
const byte SERIAL_TOPC_BUFFER_LENGTH = 77;
// Pin 13 has an LED connected.
int led = 13;
// Pin 2, 3, 4, 5, 6, 7 are reserved for Power Line
int singleTact1 = 2;
int singleTact2 = 3;
int singleTact3 = 4;
int singleTact4 = 5;
int singleTact5 = 6;
int singleTact6 = 7;
//From Arduino to sensor
byte outgoingI2CBuffer[I2C_TO_SENSOR_BUFFER_LENGTH];
//From Arduino to PC host
byte serialToPCBuffer[SERIAL_TOPC_BUFFER_LENGTH];
byte serialToPCBufferIndex_ = 0;
//From PC host to Arduino
byte serialIncomingBuffer[SERIAL_FROMPC_BUFFER_LENGTH];
byte serialIncomingBufferIndex_ = 0;
unsigned long timeStamp_;
//Zero a buffer
void BlankBuffer(byte* buffer, byte length)
{
for(int i = 0; i < length; i++)
{
buffer[i] = 0;
}
}
void ResetSerialBuffer()
{
for(int i = 0; i < SERIAL_FROMPC_BUFFER_LENGTH; i++)
{
serialIncomingBuffer[i] = 0;
}
serialIncomingBufferIndex_ = 0;
}
void setup()
{
int i;
Wire.begin(); // join i2c bus (address optional for master)
pinMode(led, OUTPUT);
Serial.begin(115200); // start serial for output
Serial.flush();
pinMode(singleTact1, OUTPUT);
pinMode(singleTact2, OUTPUT);
pinMode(singleTact3, OUTPUT);
pinMode(singleTact4, OUTPUT);
pinMode(singleTact5, OUTPUT);
pinMode(singleTact6, OUTPUT);
BlankBuffer(outgoingI2CBuffer, I2C_TO_SENSOR_BUFFER_LENGTH);
//Never changes, so just set now
serialToPCBuffer[I2C_HEADER1] = 0xFF;
serialToPCBuffer[I2C_HEADER2] = 0xFF;
serialToPCBuffer[I2C_HEADER3] = 0xFF;
serialToPCBuffer[I2C_HEADER4] = 0xFF;
digitalWrite(led, HIGH);
timeStamp_ = 0;
startTimer1(100); //Timer for timestamp
}
//Check the full footer
boolean Checkfooter(int endOfPacket)
{
for(int i = 0; i < 4; i++)
{
if(serialIncomingBuffer[endOfPacket - i] != 0xFE)
{
return false; //Footer corrupt
}
}
return true; //Footer all good
}
//Check available header bytes (called as each one comes in, building upto 4)
boolean Checkheader(int checkMaxIndex)
{
for(int j = 0; j <= checkMaxIndex && j < 4; j ++)
{
if(serialIncomingBuffer[j] != 0xFF)
{
return false; //Header corrupt
}
}
return true; //Header all good
}
//Returns true if we have a new serial data packet, otherwise returns false
//Corrupt data is removed from buffer
boolean ProcessIncomingSerialData()
{
byte i2cPacketLength; //Working variable
if(Serial.available() > 0)
{
//Read the new byte
serialIncomingBuffer[serialIncomingBufferIndex_] = Serial.read();
}
else
{
//No new data
return false;
}
if(false == Checkheader(serialIncomingBufferIndex_))
{
ResetSerialBuffer(); //Header not correct, reset buffer
return false;
}
//Do we have enough data to process
if(serialIncomingBufferIndex_ >MINIMUM_FROMPC_PACKETLENGTH)
{
if(CMD_READ == serialIncomingBuffer[I2C_FROMPC_CMD])
{
i2cPacketLength = 0;
}
else
{
i2cPacketLength = serialIncomingBuffer[I2C_FROMPC_NUM_BYTES_TO_READWRITE];
}
//Do we have a full packet
if(serialIncomingBufferIndex_ >= (i2cPacketLength + MINIMUM_FROMPC_PACKETLENGTH + 1))
{
if(Checkfooter(serialIncomingBufferIndex_))
{
//We have a good packet
return true;
}
else
{
//Corrupt packet, reset
ResetSerialBuffer();
return false;
}
}
}
//We have run out of buffer space - something has gone wrong, so just reset the buffer
if(serialIncomingBufferIndex_ >= (SERIAL_FROMPC_BUFFER_LENGTH -1))
{
ResetSerialBuffer();
}
serialIncomingBufferIndex_++; //Move the index on
return false; //Not at the end of the packet yet
}
// Define the function which will handle the notifications
ISR(timer1Event)
{
resetTimer1();
timeStamp_++;
}
void loop()
{
byte inputBuffer[43];
byte finishedPacket = false;
byte timeout = 5;
byte i = 0;
byte lengthReceived = 0;
if(ProcessIncomingSerialData())
{
if(CMD_WRITE == serialIncomingBuffer[I2C_FROMPC_CMD])
{
//We are changing settings
if(serialIncomingBuffer[I2C_FROMPC_NUM_BYTES_TO_READWRITE] > 0)
{
//Create return packet for the PC
serialToPCBuffer[I2C_ADDRESS_BYTE] = serialIncomingBuffer[I2C_ADDRESS_BYTE];
serialToPCBuffer[I2C_TIMOUT_BYTE] = 0; //We did not timeout
serialToPCBuffer[I2C_ID_BYTE] = serialIncomingBuffer[I2C_ID_BYTE];
serialToPCBuffer[I2C_TOPC_NBYTES] = 0; //No data, just ack
serialToPCBuffer[I2C_TOPC_NBYTES+1] = 0xFE;
serialToPCBuffer[I2C_TOPC_NBYTES+2] = 0xFE;
serialToPCBuffer[I2C_TOPC_NBYTES+3] = 0xFE;
serialToPCBuffer[I2C_TOPC_NBYTES+4] = 0xFE;
//Transfer data
for(int i = 0; i < serialIncomingBuffer[I2C_FROMPC_NUM_BYTES_TO_READWRITE]+4; i++)
outgoingI2CBuffer[i] = serialIncomingBuffer[i+I2C_FROMPC_CMD];
//Send I2C packet
Wire.beginTransmission(serialIncomingBuffer[I2C_ADDRESS_BYTE]); // transmit to device
Wire.write(outgoingI2CBuffer, I2C_TO_SENSOR_BUFFER_LENGTH);
Wire.endTransmission(); // stop transmitting
//Send serial ack to PC
for(int i = 0; i < (I2C_TOPC_NBYTES+5); i++)
Serial.write(serialToPCBuffer[i]);
}
}
else if(CMD_READ == serialIncomingBuffer[I2C_FROMPC_CMD])
{
byte i2cPacketLength = serialIncomingBuffer[I2C_FROMPC_NUM_BYTES_TO_READWRITE];
serialToPCBuffer[I2C_ADDRESS_BYTE] = serialIncomingBuffer[I2C_ADDRESS_BYTE];
serialToPCBuffer[I2C_TIMOUT_BYTE] = 0;
serialToPCBuffer[I2C_ID_BYTE] = serialIncomingBuffer[I2C_ID_BYTE];
serialToPCBuffer[I2C_TOPC_NBYTES] = i2cPacketLength;
serialToPCBuffer[I2C_TOPC_TIMESTAMP] = (timeStamp_ >> 24);
serialToPCBuffer[I2C_TOPC_TIMESTAMP + 1 ] = (timeStamp_ >> 16) & 0xFF;
serialToPCBuffer[I2C_TOPC_TIMESTAMP + 2 ] = (timeStamp_ >> 8) & 0xFF;
serialToPCBuffer[I2C_TOPC_TIMESTAMP + 3 ] = timeStamp_ & 0xFF;
//Perform I2C Read
outgoingI2CBuffer[0] = CMD_READ;
outgoingI2CBuffer[1] = serialIncomingBuffer[I2C_FROMPC_READWRITE_LOCATION];
outgoingI2CBuffer[2] = serialIncomingBuffer[I2C_FROMPC_NUM_BYTES_TO_READWRITE];
//Send I2C packet
Wire.beginTransmission(serialIncomingBuffer[I2C_ADDRESS_BYTE]); // transmit to device
Wire.write(outgoingI2CBuffer, 3); //Only requires 3 bytes
Wire.endTransmission(); // stop transmitting
Wire.requestFrom(serialIncomingBuffer[I2C_ADDRESS_BYTE], serialIncomingBuffer[I2C_FROMPC_NUM_BYTES_TO_READWRITE]);
//Parse request
int i = 0;
int i2cTimeout = I2C_TIMEOUT; //1s
while( i < i2cPacketLength && i2cTimeout > 0) // slave may send less than requested
{
if(Wire.available())
{
serialToPCBuffer[I2C_TOPC_NBYTES + 1 + i] = Wire.read(); // receive a byte as character
i++;
}
else
{
delay(1); //Wait 1ms
i2cTimeout--;
}
}
if(0 == timeout)
{
serialToPCBuffer[I2C_TIMOUT_BYTE] = 1;
}
//Add footer
serialToPCBuffer[I2C_TOPC_NBYTES + 1 + i2cPacketLength] = 0xFE;
serialToPCBuffer[I2C_TOPC_NBYTES + 2 + i2cPacketLength] = 0xFE;
serialToPCBuffer[I2C_TOPC_NBYTES + 3 + i2cPacketLength] = 0xFE;
serialToPCBuffer[I2C_TOPC_NBYTES + 4 + i2cPacketLength] = 0xFE;
//Send to PC
for(int i = 0; i < (I2C_TOPC_NBYTES + 5 + i2cPacketLength); i++)
Serial.write(serialToPCBuffer[i]);
}
// Transmit the Calibration Data to the Interface Board
if(CMD_WRITE_CAL == serialIncomingBuffer[I2C_FROMPC_CMD])
{
//We are changing settings
if(serialIncomingBuffer[I2C_FROMPC_NUM_BYTES_TO_READWRITE] > 0)
{
//Create return packet for the PC
serialToPCBuffer[I2C_ADDRESS_BYTE] = serialIncomingBuffer[I2C_ADDRESS_BYTE];
serialToPCBuffer[I2C_TIMOUT_BYTE] = 0; //We did not timeout
serialToPCBuffer[I2C_ID_BYTE] = serialIncomingBuffer[I2C_ID_BYTE];
serialToPCBuffer[I2C_TOPC_NBYTES] = 0; //No data, just ack
serialToPCBuffer[I2C_TOPC_NBYTES+1] = 0xFE;
serialToPCBuffer[I2C_TOPC_NBYTES+2] = 0xFE;
serialToPCBuffer[I2C_TOPC_NBYTES+3] = 0xFE;
serialToPCBuffer[I2C_TOPC_NBYTES+4] = 0xFE;
//Transfer data
for(int i = 0; i < serialIncomingBuffer[I2C_FROMPC_NUM_BYTES_TO_READWRITE]+4; i++)
{
outgoingI2CBuffer[i] = serialIncomingBuffer[i+I2C_FROMPC_CMD];
}
//Send I2C packet
Wire.beginTransmission(serialIncomingBuffer[I2C_ADDRESS_BYTE]); // transmit to device
Wire.write(outgoingI2CBuffer, I2C_TO_SENSOR_BUFFER_LENGTH);
Wire.endTransmission(); // stop transmitting
//Send serial ack to PC
for(int i = 0; i < (I2C_TOPC_NBYTES+5); i++)
{
Serial.write(serialToPCBuffer[i]);
}
}
}
// Toggle the GPIO Pin to set the I2C address when doing Calibration test
else if (CMD_TOGGLE_GPIO == serialIncomingBuffer[I2C_FROMPC_CMD])
{
serialToPCBuffer[I2C_ADDRESS_BYTE] = serialIncomingBuffer[I2C_ADDRESS_BYTE];
serialToPCBuffer[I2C_TIMOUT_BYTE] = 0; //We did not timeout
serialToPCBuffer[I2C_ID_BYTE] = serialIncomingBuffer[I2C_ID_BYTE];
serialToPCBuffer[I2C_TOPC_NBYTES] = 0; //No data, just ack
int toggle = serialToPCBuffer[I2C_FROMPC_CMD+1];
if (TOGGLE_ALL == serialIncomingBuffer[I2C_FROMPC_CMD+1])
{
digitalWrite(singleTact1, HIGH);
digitalWrite(singleTact2, HIGH);
digitalWrite(singleTact3, HIGH);
digitalWrite(singleTact4, HIGH);
digitalWrite(singleTact5, HIGH);
digitalWrite(singleTact6, HIGH);
}
else if (TOGGLE_NONE == serialIncomingBuffer[I2C_FROMPC_CMD+1])
{
digitalWrite(singleTact1, LOW);
digitalWrite(singleTact2, LOW);
digitalWrite(singleTact3, LOW);
digitalWrite(singleTact4, LOW);
digitalWrite(singleTact5, LOW);
digitalWrite(singleTact6, LOW);
Wire.endTransmission();
delay(50);
Wire.begin();
}
else
{
digitalWrite(singleTact1, LOW);
digitalWrite(singleTact2, LOW);
digitalWrite(singleTact3, LOW);
digitalWrite(singleTact4, LOW);
digitalWrite(singleTact5, LOW);
digitalWrite(singleTact6, LOW);
digitalWrite(serialIncomingBuffer[I2C_FROMPC_CMD+1], HIGH);
}
serialToPCBuffer[I2C_TOPC_NBYTES+1] = 0xFE;
serialToPCBuffer[I2C_TOPC_NBYTES+2] = 0xFE;
serialToPCBuffer[I2C_TOPC_NBYTES+3] = 0xFE;
serialToPCBuffer[I2C_TOPC_NBYTES+4] = 0xFE;
//Send serial ack to PC
for(int i = 0; i < (I2C_TOPC_NBYTES+5); i++)
{
Serial.write(serialToPCBuffer[i]);
}
}
ResetSerialBuffer(); //Reset and wait for next command
}
}