I am interested in determining direction (bearing) from one module to another that could be anywhere from 2 to say 50m apart. As there is no room for antennae larger than a couple of inches, I don't see radio direction finding as useful.
GPS on the face of it, is also not useful as at this close range, GPS error of up to several meters would make the direction too inaccurate.
But... I was wondering if GPS error is reliably the same for two receivers that are near to each other? If so, then this "constant" error is no problem as the two units are in the same frame of reference for calculating the bearing.
Does anyone know if this is the case?
Lots of people have had the same idea, over the last 30 years or so. But no, it does not work.
Even supposedly identical receivers have different internal noise, slightly different timing for the reception of signals, and different signal amplitudes at the antenna, which adds up to unpredictably different position errors.
It is an easy and cheap experiment to do, so try it out and convince yourself.
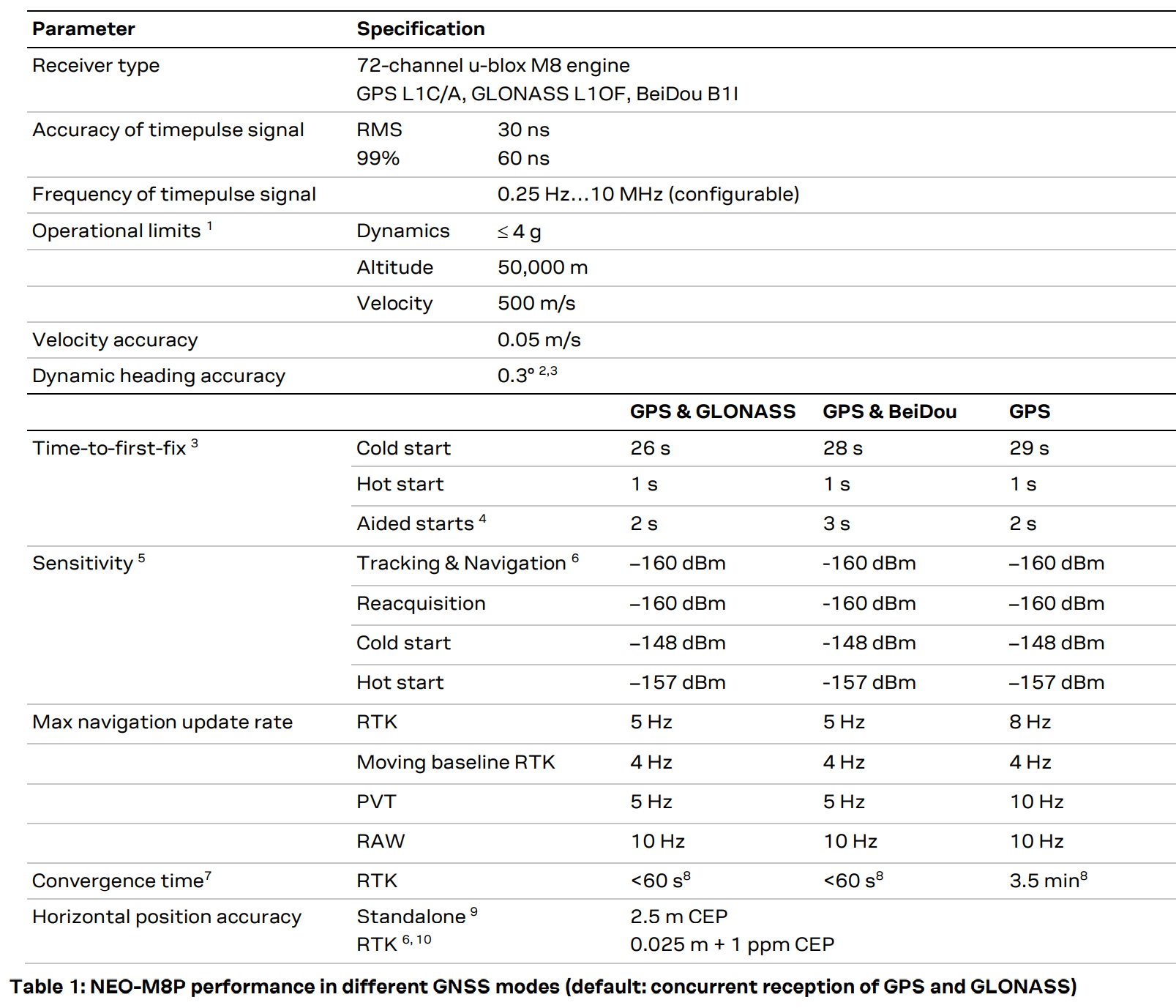
For accurate relative or absolute positioning over those distances, you need an RTK setup. Prices have come down, and the Ublox C94-M8P kit works really well (+/- 10 cm position error): C94-M8P
I paid about $400 for the base station/rover pair 3-4 years ago, which is quite cheap considering that it comes complete with a UHF radio link good for about 20 km line of sight range (base to rover), and works out of the box.
To date nothing comparable has been offered for even that price, and most are quite a bit more expensive. If you need that accuracy, that is what you have to pay, and the price won't come down soon.
RTK is short for real time kinematics. A GPS receiver capable of RTK takes in the normal signals from the Global Navigation Satellite Systems along with a correction stream to achieve 1cm positional accuracy. GNSS includes satellites from GPS (USA), GLONASS (Russia), Beidou (China), and Galileo (Europe). On top of these signals an RTK receiver takes in an RTCM correction stream and then calculates your location with 1cm accuracy in real time.
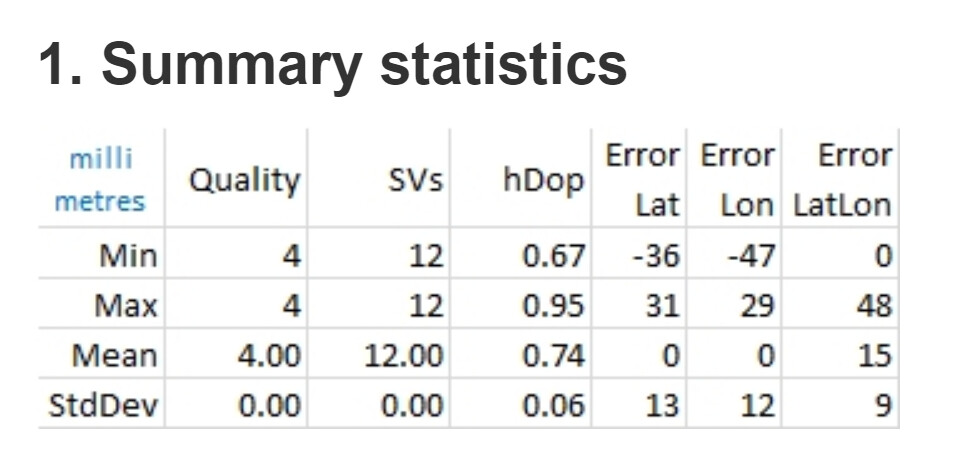
Correct. In the C94-M8P kit, the base station provides either a relative or absolute position (if known), and broadcasts corrections to the rover. Rover positional accuracy is typically +/- 10 cm relative to the base station.
Many electric golf carts include an RF remote control so you can steer the thing down the fairway. A small number of very expensive models have the smarts to follow you (the remote in your back pocket).
I am interested, just for fun, in implementing this feature on my dumb, remote controlled cart. Ideally the cart would follow you a few yards behind, so if the error was a couple of yards, it would be zig zagging all over the place. Naturally this can be smoothed with a little digital number smoothing.
If I can hack the remote, I would do that, alternatively bypass the remote and receiver and control with my own. It's a simple 4 button unit.
Considering how easy and cheap it should be to modify a standard cart for follow me, just add a couple of cheap GPSs to the existing electronics and some easy software and your done (allegadly).
So all the engineers who would obviously realise this and introduce their own much money making low cost product have to be kept quiet.
Of course there could be a good technical reason why low cost GPSs follow me carts are not produced ...........
It is not a conspiracy. Common for ranges of electronic products to be built for close to the same cost but sold at different prices for marketing distinction reasons. Same for cars.
Not sure why you feel you need to persist with this strawman argument that making this conversion would be a doddle, given nobody as said that.
Now please stop dragging this thread off topic, say something useful about implementing follow-me control or start a new thread.