Ciao a tutti. Ho istallato il file .hex della GRBL sulla mia arduino uno usando xloader ed invio il gcode con un programma chiamato G-code sender. Utilizzo due l297 per interpretare i comandi della grbl e due uln2003 per pilore i miei motori. Collego tutto secondo questo schemahttp://hades.mech.northwestern.edu/images/d/d2/Unipolar_stepper_circuit_schematic.png ma il motore fa solo un passo, prima indietro poi avanti ogni 2-3 secondi. Posto l'esempio di Gcode preso dal sito della grbl
Fai una corsa ad ostacoli da 3000 metri e non sai se Ti sei allaciato le scarpe.
Che motori usi?
Se metti sul pin CW/CCW H e metti un onda rettangolare diciamo di 10Hz sul pin CLK del L297 il relativo motore si muove correttamente?
Ciao Uwe
EDIT: Ok, ho visto che mette una r da 22K tra osc e 5V e un condensatore da 33nf tra OSC e gnd. Provo così sperando di non fondere l'integrato poi Ti so dire.
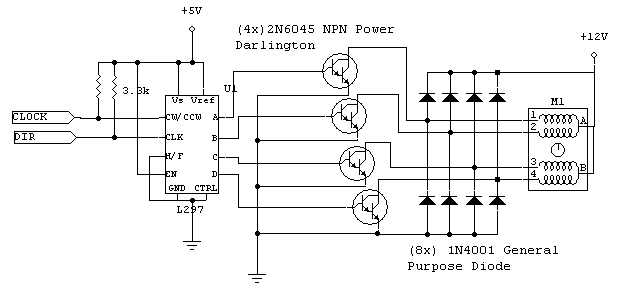
Col L287 puoi realizzare un pilotaggio del motore in tensione o in corrente. Le resistenze Rs1 e Rs2 servono per misurare la corrente e insieme a SENSE1, SENSE2, Vref, INH1 e INH2 limitarla perché sopra una soglia il L297 spegne i transistori.
La cosa piú semplice é pilotare il motore in tensione e lí non servono le resistenze Rs1 e Rs2. Non puoi realizzare un pilotaggio in corrente perché usando 4 transistori non hai la possibilitßa di inibirli a coppia. per farlo servirebbe della logica tra uscite A,B,C,D e INH1 e INH2 oltre a una tensione di alimentazione dei motori molto piú alta. Dovresti usare un driver tipo il L298.




{kind=link}