Well, I have burned my motorshield, and as I cannot get a new one as soon as I need it (by monday) I need to know how do I apply the brake to the DC motor with a H Bridge. Is it the same? Or how do I do that?
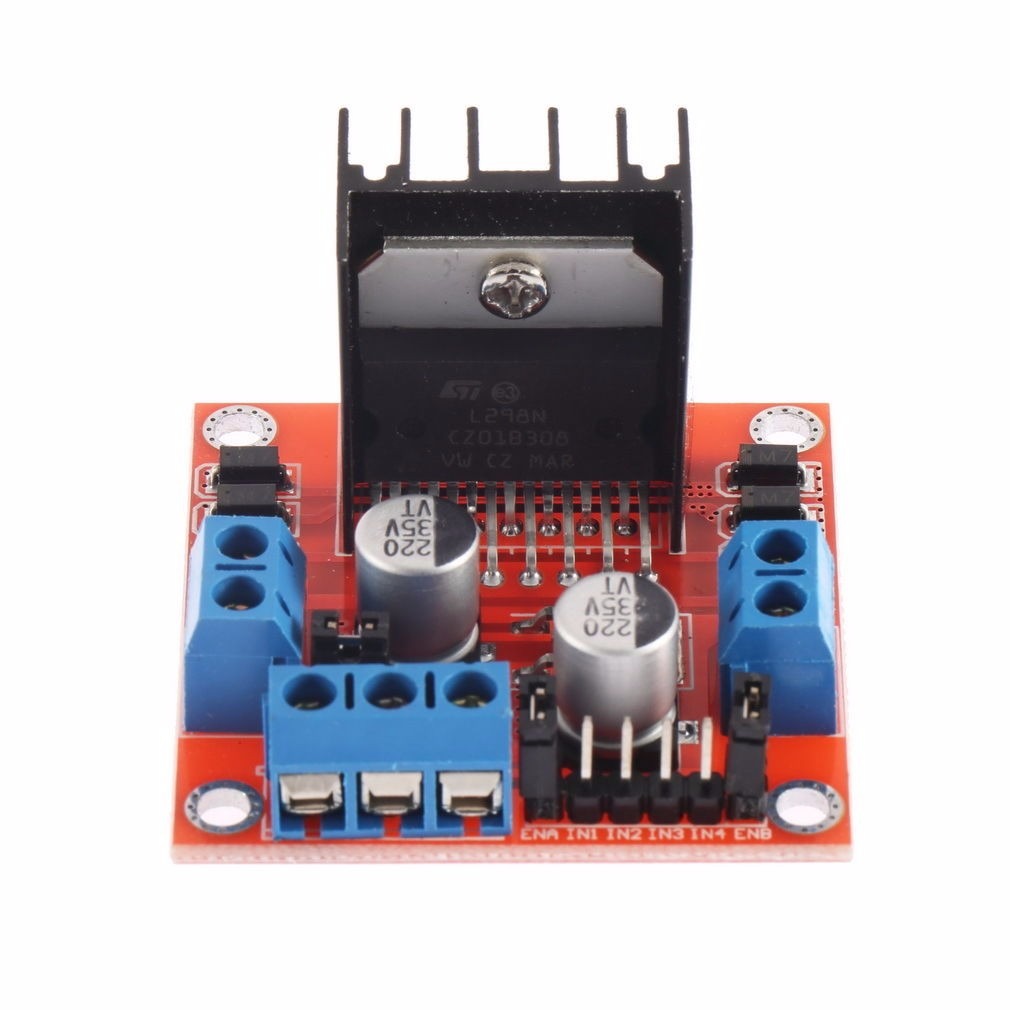
I also have this driver if its easier, that would be great.
This is my test code Im using, Im building a sumo bot but the inertia of the motors when they stop will make my robot to fell off the dojo. Thats why I need the brake function.
const int
PWM_A = 3,
DIR_A = 12,
BRAKE_A = 9,
SNS_A = A0;
void setup() {
// Configure the A output
pinMode(BRAKE_A, OUTPUT); // Brake pin on channel A
pinMode(DIR_A, OUTPUT); // Direction pin on channel A
// Open Serial communication
Serial.begin(9600);
Serial.println("Motor shield DC motor Test:\n");
}
void loop() {
// Set the outputs to run the motor forward
digitalWrite(BRAKE_A, LOW); // setting brake LOW disable motor brake
digitalWrite(DIR_A, HIGH); // setting direction to HIGH the motor will spin forward
analogWrite(PWM_A, 255); // Set the speed of the motor, 255 is the maximum value
delay(5000); // hold the motor at full speed for 5 seconds
Serial.print("current consumption at full speed: ");
Serial.println(analogRead(SNS_A));
// Brake the motor
Serial.println("Start braking\n");
// raising the brake pin the motor will stop faster than the stop by inertia
digitalWrite(BRAKE_A, HIGH); // raise the brake
delay(5000);
// Set the outputs to run the motor backward
Serial.println("Backward");
digitalWrite(BRAKE_A, LOW); // setting againg the brake LOW to disable motor brake
digitalWrite(DIR_A, LOW); // now change the direction to backward setting LOW the DIR_A pin
analogWrite(PWM_A, 255); // Set the speed of the motor
delay(5000);
Serial.print("current consumption backward: ");
Serial.println(analogRead(SNS_A));
// now stop the motor by inertia, the motor will stop slower than with the brake function
analogWrite(PWM_A, 0); // turn off power to the motor
Serial.print("current brake: ");
Serial.println(analogRead(A0));
Serial.println("End of the motor shield test with DC motors. Thank you!");
while(1);
}