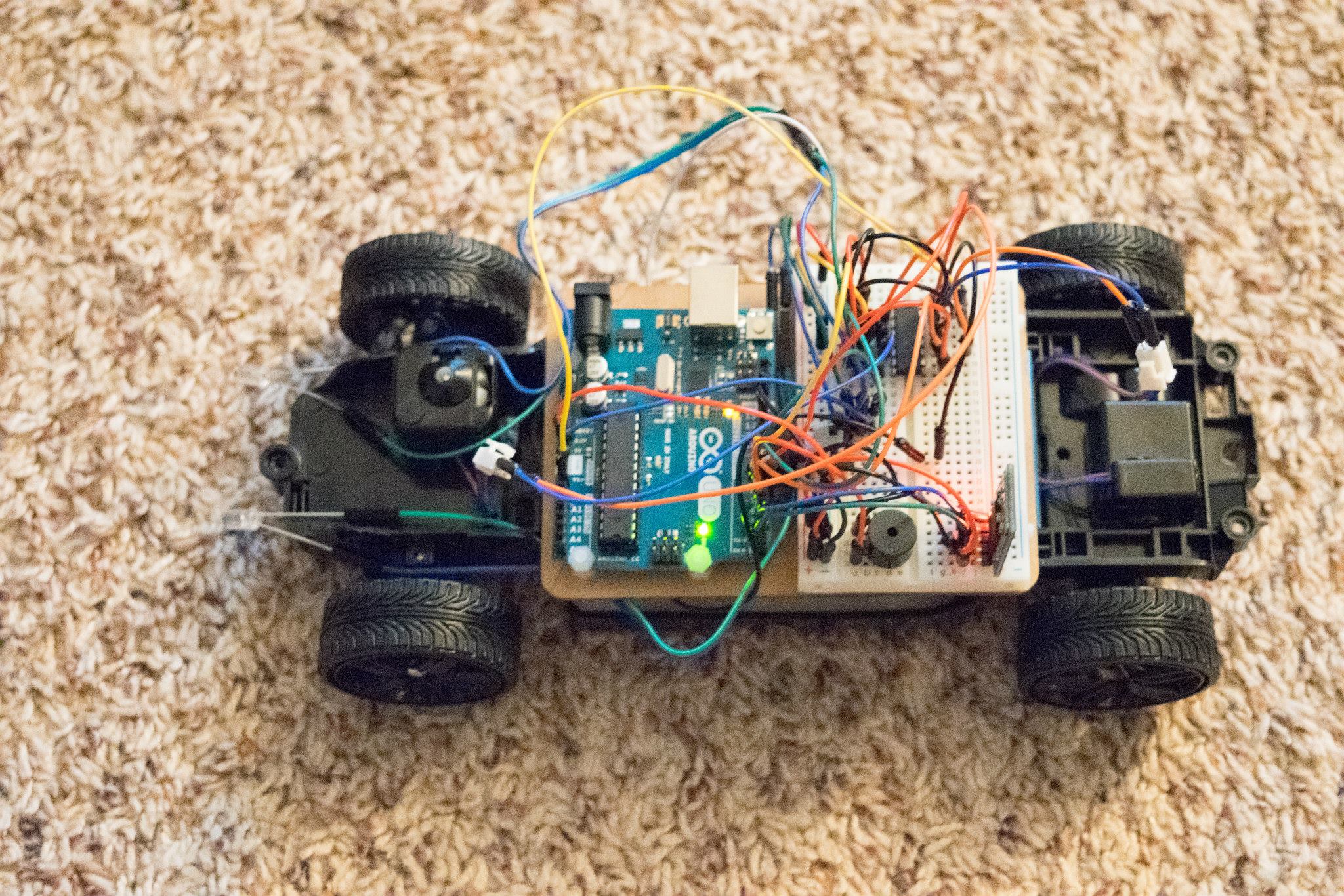
Here is the code that i have been using for small RC car. Code is downloaded from:
http://www.ardumotive.com/arduino-car
/*
//L293 Connection
const int motorA1 = 5; // Pin 2 of L293
const int motorA2 = 6; // Pin 7 of L293
const int motorB1 = 10; // Pin 10 of L293
const int motorB2 = 9; // Pin 14 of L293
//Leds connected to Arduino UNO Pin 12
const int lights = 12;
//Buzzer / Speaker to Arduino UNO Pin 3
const int buzzer = 3 ;
//Bluetooth (HC-06 JY-MCU) State pin on pin 2 of Arduino
const int BTState = 2;
//Calculate Battery Level
const float maxBattery = 8.0;// Change value to your max battery voltage level!
int perVolt; // Percentage variable
float voltage = 0.0; // Read battery voltage
int level;
// Use it to make a delay... without delay() function!
long previousMillis = -100010;// -100010=-10sec. to read the first value. If you use 0 then you will take the first value after 10sec.
long interval = 100010; // interval at which to read battery voltage, change it if you want! (101000=10sec)
unsigned long currentMillis; //unsigned long currentMillis;
//Useful Variables
int i=0;
int j=0;
int state;
int vSpeed=200; // Default speed, from 0 to 255
void setup() {
// Set pins as outputs:
pinMode(motorA1, OUTPUT);
pinMode(motorA2, OUTPUT);
pinMode(motorB1, OUTPUT);
pinMode(motorB2, OUTPUT);
pinMode(lights, OUTPUT);
pinMode(BTState, INPUT);
// Initialize serial communication at 9600 bits per second:
Serial.begin(9600);
}
void loop() {
//Stop car when connection lost or bluetooth disconnected
if(digitalRead(BTState)==LOW) { state='S'; }
//Save income data to variable 'state'
if(Serial.available() > 0){
state = Serial.read();
}
//Change speed if state is equal from 0 to 4. Values must be from 0 to 255 (PWM)
if (state == '0'){
vSpeed=0;}
else if (state == '1'){
vSpeed=100;}
else if (state == '2'){
vSpeed=180;}
else if (state == '3'){
vSpeed=200;}
else if (state == '4'){
vSpeed=255;}
/Forward*****/
//If state is equal with letter 'F', car will go forward!
if (state == 'F') {
analogWrite(motorA1, vSpeed); analogWrite(motorA2, 0);
analogWrite(motorB1, 0); analogWrite(motorB2, 0);
}
/Forward Left**/
//If state is equal with letter 'G', car will go forward left
else if (state == 'G') {
analogWrite(motorA1, vSpeed); analogWrite(motorA2, 0);
analogWrite(motorB1, 200); analogWrite(motorB2, 0);
}
/Forward Right**/
//If state is equal with letter 'I', car will go forward right
else if (state == 'I') {
analogWrite(motorA1, vSpeed); analogWrite(motorA2, 0);
analogWrite(motorB1, 0); analogWrite(motorB2, 200);
}
/Backward*****/
//If state is equal with letter 'B', car will go backward
else if (state == 'B') {
analogWrite(motorA1, 0); analogWrite(motorA2, vSpeed);
analogWrite(motorB1, 0); analogWrite(motorB2, 0);
}
/Backward Left**/
//If state is equal with letter 'H', car will go backward left
else if (state == 'H') {
analogWrite(motorA1, 0); analogWrite(motorA2, vSpeed);
analogWrite(motorB1, 200); analogWrite(motorB2, 0);
}
/Backward Right**/
//If state is equal with letter 'J', car will go backward right
else if (state == 'J') {
analogWrite(motorA1, 0); analogWrite(motorA2, vSpeed);
analogWrite(motorB1, 0); analogWrite(motorB2, 200);
}
/Left**/
//If state is equal with letter 'L', wheels will turn left
else if (state == 'L') {
analogWrite(motorA1, 0); analogWrite(motorA2, 0);
analogWrite(motorB1, 200); analogWrite(motorB2, 0);
}
/Right**/
//If state is equal with letter 'R', wheels will turn right
else if (state == 'R') {
analogWrite(motorA1, 0); analogWrite(motorA2, 0);
analogWrite(motorB1, 0); analogWrite(motorB2, 200);
}
/Lights*****/
//If state is equal with letter 'W', turn leds on or of off
else if (state == 'W') {
if (i==0){
digitalWrite(lights, HIGH);
i=1;
}
else if (i==1){
digitalWrite(lights, LOW);
i=0;
}
state='n';
}
/Horn sound*****/
//If state is equal with letter 'V', play (or stop) horn sound
else if (state == 'V'){
if (j==0){
tone(buzzer, 1000);//Speaker on
j=1;
}
else if (j==1){
noTone(buzzer); //Speaker off
j=0;
}
state='n';
}
/Stop*****/
//If state is equal with letter 'S', stop the car
else if (state == 'S'){
analogWrite(motorA1, 0); analogWrite(motorA2, 0);
analogWrite(motorB1, 0); analogWrite(motorB2, 0);
}
/Battery******/
//Read battery voltage every 10sec.
currentMillis = millis();
if(currentMillis - (previousMillis) > (interval)) {
previousMillis = currentMillis;
//Read voltage from analog pin A0 and make calibration:
voltage = (analogRead(A0)*5.015 / 1024.0)11.132;
//Calculate percentage...
perVolt = (voltage100)/ maxBattery;
if (perVolt<=75) { level=0; }
else if (perVolt>75 && perVolt<=80) { level=1; } // Battery level
else if (perVolt>80 && perVolt<=85) { level=2; } //Min ------------------------ Max
else if (perVolt>85 && perVolt<=90) { level=3; } // | 0 | 1 | 2 | 3 | 4 | 5 | >
else if (perVolt>90 && perVolt<=95) { level=4; } // ------------------------
else if (perVolt>95) { level=5; }
Serial.println(level);
}
}