Hey there!
First of all, happy new year! ![]()
I'm kinda stuck with my current project and I hope you can help me:
I'd like to automate a knitting machine for my sister. Usually they're meant to be used by hand using a crank.
This is how it looks like:


My goal is to apply a motor to it. Then I'd like to add some logic to automatically stop the machine if my sister needs to change the whool or if the knitting is done. To be honest, I'm new to all hardware related stuff, since I'm a web developer.
What I did so far:
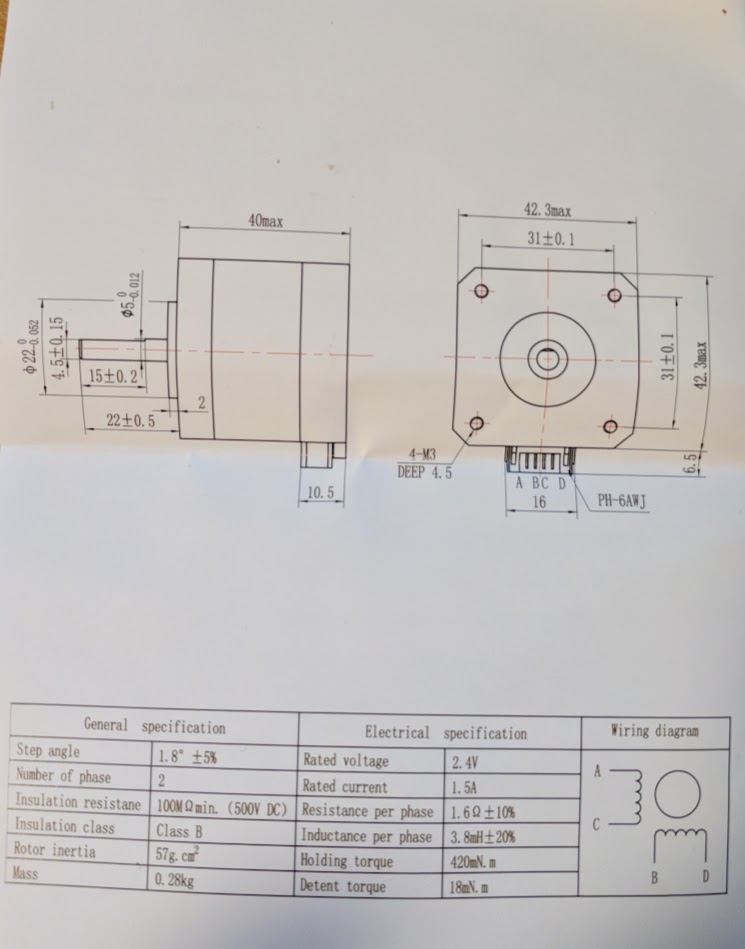
My first approach was using a stepper motor, because I wanted the project to be as accurate as possible, so no additional knitting rows can occur.
I also glued (please don't hate me) this little guy...

... on the center of the crank in order to transfer the movement to the knitting machine.
I soon realized that stepper motors take a lot of voltage while being too slow for my approach. For one knitting round I need about 5 seconds by hand while the stepper motor took about 25 seconds.
I recently switched from a Raspberry Pi to a Arduino Mega and now I'm stuck with the following questions:
- How do I find out what kind of motor is suitable for this?
- What specs are required for that motor? How do I calculate them?
- Is there a better way to move that crank besides glueing something to it?
Thanks in advance! Hope you'll have a nice day.
Best regards,
HowlingCoder