Hi everyone,
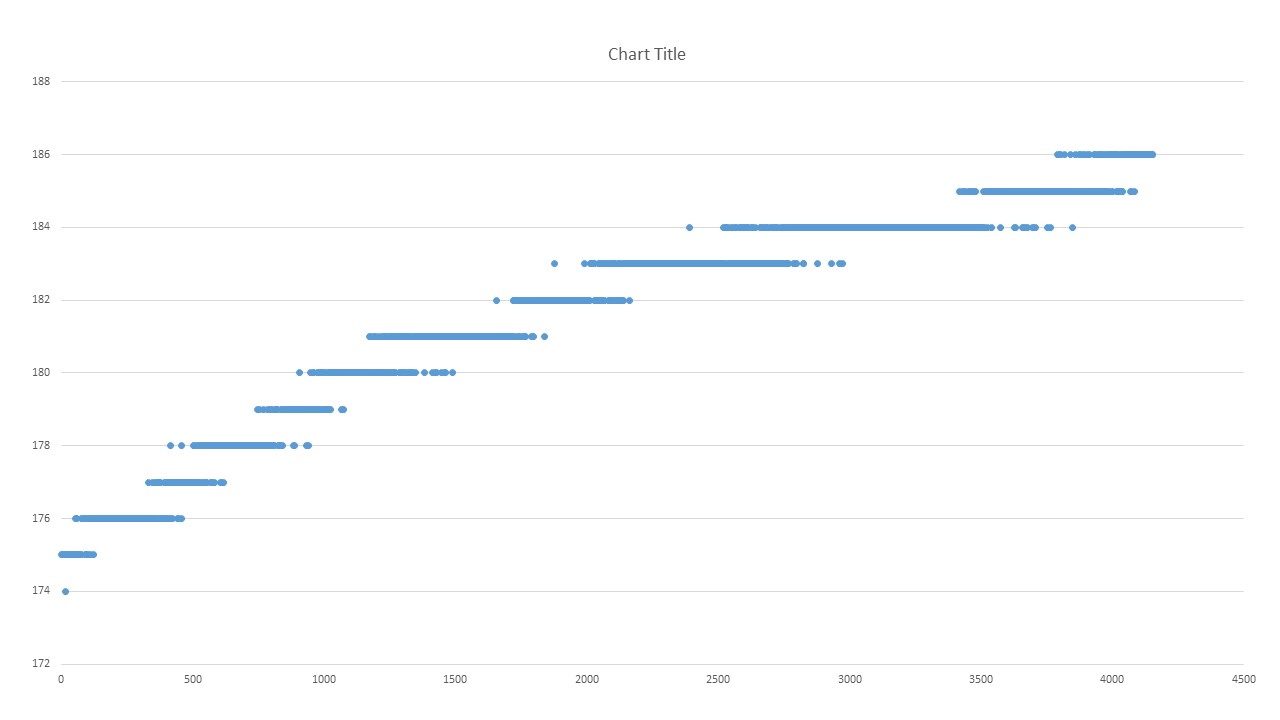
So recently I'm working in a project that requires Lidar Lite V2. I have setup a number of test to test out how accurate it is. However, I realised that there is a increase in error when I left the sensor stationary(without any interfere in test out region). The output was 175cm and continuously jump by 1cm to 185cm over a 2 minute period.
The image below shows the reading over that 2 minutes time frame.
Is there anyway to calibrate the Lidar Lite V2?
Please help!!!!
/* This script is designed to take several readings from the maxbotix sonar and generate a mode/median.
Author: Jason Lessels
Date created: 2011/June/06
License: GPL (=>2)
This work has been compileed using many sources mainly posts/wiki posts from;
Allen, Bruce (2009/July/23) and Gentles, Bill (2010/Nov/12)
*/
#include <Wire.h>
#include <LIDARLite.h>
LIDARLite myLidarLite;
//variables needed to store values
int arraysize = 9; //quantity of values to find the median (sample size). Needs to be an odd number
//declare an array to store the samples. not necessary to zero the array values here, it just makes the code clearer
int rangevalue[] = { 0, 0, 0, 0, 0, 0, 0, 0, 0};
long pulse;
int modE;
void setup() {
Serial.begin(115200);
myLidarLite.begin();
myLidarLite.beginContinuous();
pinMode(3, INPUT);
}
//Main loop where the action takes place
void loop() {
if(!digitalRead(3)){
int value = myLidarLite.distanceContinuous();
}
for(int i = 0; i < arraysize; i++)
{
rangevalue[i] = myLidarLite.distanceContinuous();
delay(10);
}
isort(rangevalue,arraysize);
modE = mode(rangevalue,arraysize);
Serial.print(modE);
Serial.println();
Serial.print("\n");
//delay(1000);
}
/*-----------Functions------------*/ //Function to print the arrays.
void printArray(int *a, int n) {
for (int i = 0; i < n; i++)
{
Serial.print(a[i], DEC);
Serial.print(' ');
}
Serial.println();
}
//Sorting function
// sort function (Author: Bill Gentles, Nov. 12, 2010)
void isort(int *a, int n){
// *a is an array pointer function
for (int i = 1; i < n; ++i)
{
int j = a[i];
int k;
for (k = i - 1; (k >= 0) && (j < a[k]); k--)
{
a[k + 1] = a[k];
}
a[k + 1] = j;
}
}
//Mode function, returning the mode or median.
int mode(int *x,int n){
int i = 0;
int count = 0;
int maxCount = 0;
int mode = 0;
int bimodal;
int prevCount = 0;
while(i<(n-1)){
prevCount=count;
count=0;
while(x[i]==x[i+1]){
count++;
i++;
}
if(count>prevCount&count>maxCount){
mode=x[i];
maxCount=count;
bimodal=0;
}
if(count==0){
i++;
}
if(count==maxCount){//If the dataset has 2 or more modes.
bimodal=1;
}
if(mode==0||bimodal==1){//Return the median if there is no mode.
mode=x[(n/2)];
}
return mode;
}
}