Can you share the link where you've ordered your servos?
How many GPIO's you've used for each servo? ![]()
I bought the metal geared servos from Amazon, Amazon.com : metal geared servo
1 Like
Very interesting...
For the project of my group it wouldnt be necessary to include machine learning...
It would be ( because we are just "newbies" ) very hard to deal with such a problem ![]()
Thank you very much! ![]()
1 Like
Plastic geared servos do not have an accurate movement repeatability as do metal geared servos. Also the plastic wears out after 100 or so hours of continuous operations. I got some metal geared hobby grade servos in continuous operation for over 3 years.
sounds plausible... ![]()
An esp32 has two processor cores, each of which is 10 times faster than Mega's, and they are 32-bit compared to Mega's 8-bit. There is far more ram memory and flash memory. The only thing the esp has less of is pins. The number of pins can be extended using I/o extender chips/modules of various kinds.
Depending on the type of driver module you use for stepper motors, they can require up to 4 Arduino pins per motor. Better driver modules use less pins, possibly sharing the same 2 pins between several driver modules (those with i²c bus).
Servo motors usually have drivers built in and require only a single Arduino pin, although it must be a PWM capable pin. Some i/o extender modules can be used to increase the number of pwm capable pins (such as pca9685).
That sounds quit good...
Thank you very much! ![]()
Controlling 32 Servo motors with PCA9685 and ESP32 - V4 - YouTube
How in the video above I am going to do a similiar thing with the roboter arm ![]()
Would an MG996R be recommendable?
Like:
Amazon.com: [4-Pack] MG996R 55g Metal Gear Torque Digital Servo Motor for Futaba JR RC Helicopter Car Boat Robot : Toys & Games
Quite. Quit means give up.
I didnt meant that, I meant something like... very good it wasnt ironic ![]()
I watched

using this sensor
https://de.aliexpress.com/item/1005002969955647.html
I ordered one, but have not played with it yet.
This is how you can go using I2C Bus (Fig-1).
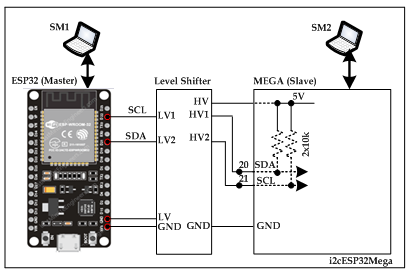
Figure-1:
Test Sketches:
Master:
#include <Wire.h>
void setup()
{
Serial.begin(115200);
Wire.begin(21, 22); //SDA, SCL
//-------------------------
Wire.beginTransmission(0b0010011); //slave address
byte busStatus = Wire.endTransmission();
if (busStatus != 0)
{
Serial.print("Communication problem...!");
while (1);
}
Serial.println("Slave found...!");
}
void loop()
{
Wire.requestFrom(0x13, 1);
Serial.println(Wire.read(), HEX);
delay(1000);
}
Slave:
#include <Wire.h>
void setup()
{
Serial.begin(115200);
Wire.begin(0b0010011); //0x20
Wire.onRequest(sendEvent);
}
void loop(){}
void sendEvent()
{
Wire.write(0x31);
}
This topic was automatically closed 180 days after the last reply. New replies are no longer allowed.