Hello all,
I am trying to control a GS1 VFD (variable frequency drive) via the modbus port.
Hardware
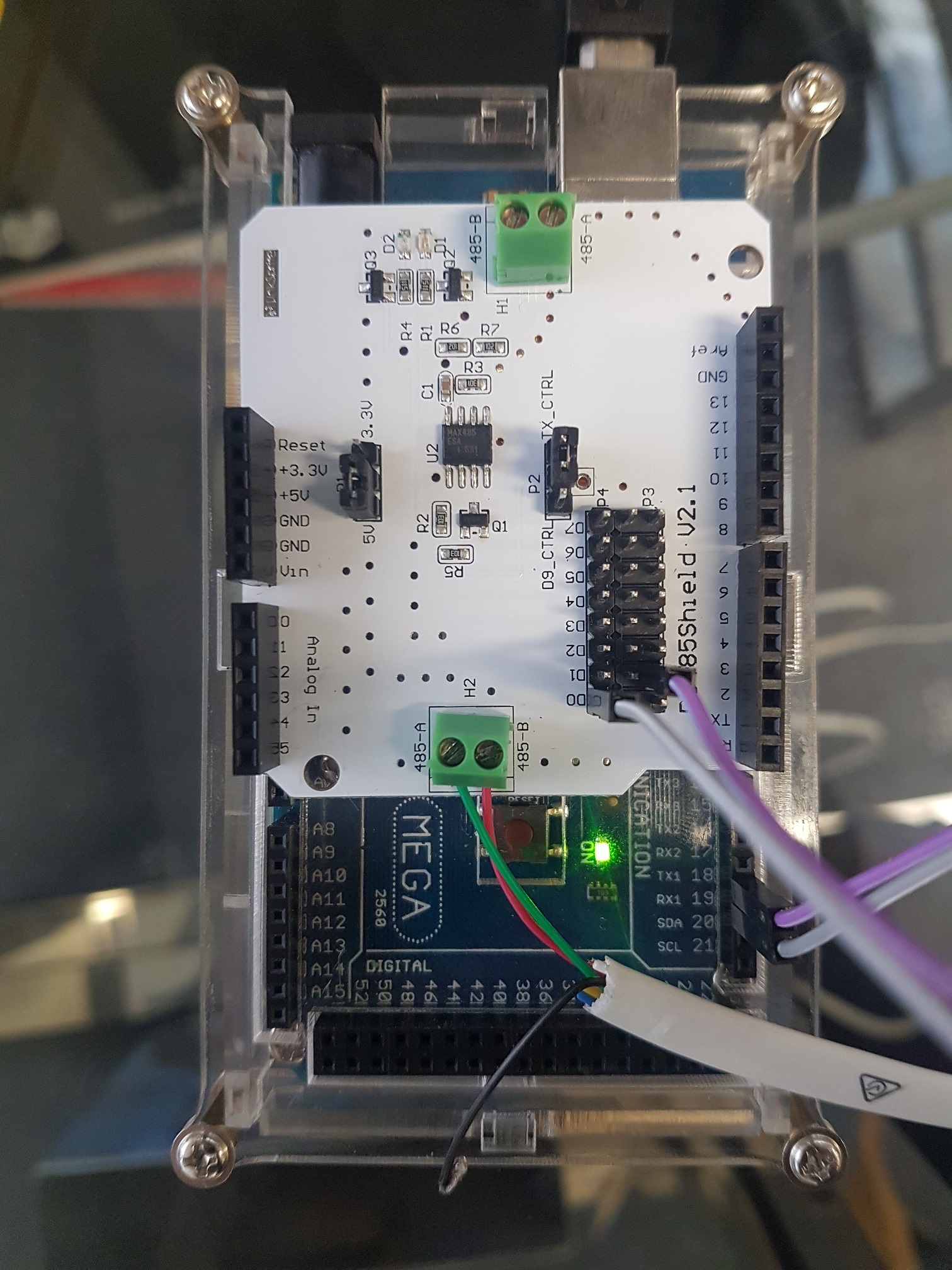
- Arduino Mega with RS485 shield (
-RS485 shield set to 5V
-RS485 shield set to TX_CTRL - Mega pin TX1 connected to P3 (TX)
- Mega pin RX1 connected to P4 (RX)
- RS485 shield terminal A connected to GS+
- RS485 shield terminal B connected to GS- (have switched multiple times to check polarity)
I have verified that the the drive is wired to the motor correctly as i can control via the keypad.
GS1 settings
Motor parameters set and working
Parameter Description Setting Description
P3.00 Source of Operation command 4 Operation controlled via RS485
P4.00 Source of Frequency command 5 Frequency determined via RS485
P9.00 Communication address 1 modbus address 1
P9.01 Transmission speed 1 9600baud
9.02 Communication protocol 0 modbus ASCII (7data, no parity, 2 stop)
Software
To start with i just wanted to try and spin the motor to ensure the comms and and packets were all set right.
Debugging
- As you can see from the software i am outputting out serial 1 (USB) to check the values are being displayed correctly and the program is running.
- I have used a "Bitscope" to see the data coming out of the RS485 shield. It shows packets but they arent being displayed correctly
Attachments
Code - below
GS1 user manual chapter 5 communications
Photo of wiring
Screenshot from Bitscope
/*
Author : David 4dice
Interfacing VFD with Arduino Via RS485 using MODBUS Protocol
MODBUS protocol
- Start, stop and Frequency to VFD sent through modbus RS485
Modbus data format
-------------------------------------------------------------------------
| Start Bit | Address | Function_Command | DATA | LRC or CRC | Stop bit |
| : | 2bytes | 2 bytes | | 2 bytes | \r\n |
-------------------------------------------------------------------------
Function Code : The format of data characters depend on function codes
The available function codes are described as follows:
0x03 : Read data from register
0x06 : Write single data to register
0x10 : Write multiple data to registers
MODBUS Protocol ASCII mode
HARDWARE: Arduino Mega using ATmega 1280
RS485 shield,
GS1 VFD
*/
//commands values
#define SSerialTxControl 3 //RS485 Direction control pin
#define RS485Transmit HIGH //RS485 comms mode (high = transmit, low = receive)
#define RS485Receive LOW
char speed_vfd[] = ":00060310001EC8\r\n"; //VS1 frequency 30Hz 1E in hex
/*
* 01 = address constant
* 06 = write single register
* 0310 = register address
* 001E = 30 hz
* C8 = manual lrc calc
*/
const char start_vfd[] = ":0006091B0001D4\r\n"; //VS1 drive hard coded signal
/*
* 01 = address constant
* 06 = write single register
* 091B = register address
* 0001 = value to write to address
* D4 = manual lRC calc
*/
const char stop_vfd[] = ":0006091B0000D5\r\n"; //VS1 drive hard coded signal
/*
* 01 = address constant
* 06 = write single register
* 2000 = register address
* 0011 = value to write to address
* C8 = manual lRC calc
*/
const char start_n_freq[] = ":0110091B000204025800015A66\r\n"; //from user manual, set speed to 60hz and set to run. Tried this as another option with no luck
void setup(){
Serial.begin(9600); //initialse USB
Serial1.begin(9600); //initialise RS485
pinMode(SSerialTxControl, OUTPUT); //initilise comms enable pin not currently being used, just have jumper set to TX
Serial.println("Modbus VFD Controller \n");
}//end of setup
void loop(){
digitalWrite(SSerialTxControl, RS485Transmit); // Enable RS485 Transmit
delay(50);
Serial1.print(start_vfd); //converts to ascii, sends start command to VFD
Serial1.println();
delay(100);
digitalWrite(SSerialTxControl, RS485Receive); // Disable RS485 Transmit
Serial.println("VFD start command sent\r\n"); //debug output to ensure output is changing
Serial.print(start_vfd);
Serial.println();
delay(5000);
digitalWrite(SSerialTxControl, RS485Transmit); // Enable RS485 Transmit
delay(50);
Serial1.print(speed_vfd); //converts to ascii, sends start command to VFD
Serial1.println();
delay(100);
digitalWrite(SSerialTxControl, RS485Receive); // Disable RS485 Transmit
Serial.println("VFD frequency sent\r\n"); //debug output to ensure output is changing
Serial.print(speed_vfd);
Serial.println();
delay(5000);
}//end of loop