Hello all, I need help in making a micromouse, I have all the algorithms available, but just need help in deciding which components to use.
That's a very open-ended question. I'd suggest to start by reading up on how others have implemented theirs and then take inspiration from it. Surely there are some documented designs.
1 Like
There should be plenty of designs out there that you could take inspiration from. The MicroMouse competition has been running since the 70's.
The wikipedia link should get you started.
If you have the algorithms, then you know which sensors are needed to feed data to those algorithms.
Many of those algorithms will require large amounts of computing power and memory. A basic Arduino like Nano 3 or Uno will not be capable of running them quickly enough, or not capable at all. So choosing your microcontroller wisely is important.
If I were building a micro mouse, and I have wanted to build one for many years, I might choose a Raspberry Pi Zero.
I don't think that any wireless/RF capability would be allowed in a contest, but could be very useful during development and testing, so I might choose a Zero W for development, which I could then swap for a Zero (non-W) during a contest.
An RPi is not an Arduino, of course. So if it must be an Arduino or Arduino compatible, then a Teensy 4.0 has similar processing power and memory.
Thanks for the suggestions everyone, also please suggest what motor, motor driver, encoder and would be the best fit.
Also please tell me how does the bot knows that it has reached the destination of the maze/solved the maze and now return to the original/starting point?
Motors that have encoders and gearboxes built-in would make the project simpler.
For motor driver, do not choose any that use L298, L293. Those are old and inefficient designs and not good for battery power. Something more modern and efficient like TB6612FNG may be more suitable.
ok and what about battery and sensors, my teammate is suggesting ultrasonic sensor. should I use that?
Usually the destination is at the centre of the maze and there is often a post in the centre with no adjoining walls, like this:
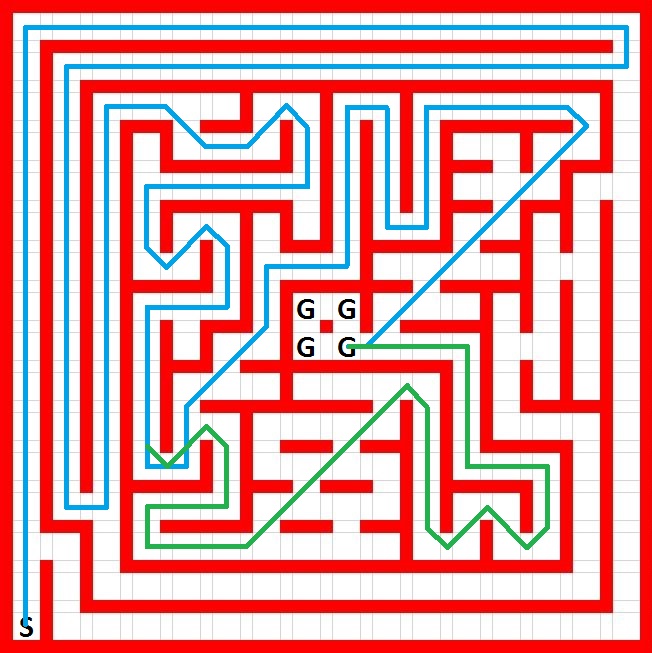
I am not sure how the robot will know it had reached the centre. Possibly by dead-recconing it's position from the starting point at the corner. Possibly by recognising that the post has no adjacent walls. You will have to research and experiment.
Maybe. But ultrasonic sensors have a minimum range and the robot may be too close to the walls to measure that distance.
LASER Time-of-Flight sensors may be an alternative. You must research their capabilities to know which will be more suitable.
Li-ion or Li-Po batteries hold most energy for their size. These types of battery can be dangerous and must be protected against over-charge and over-discharge.
Another possibility is NiMH cells.
You should always start with an internet search, "micromouse diy" and find many.
2 Likes
you want us to do your research? If so how will you know if the suggestions are suitable for your application?
The best overview on Micromouse is this one from Veritasium. Extremely competitive!

2 Likes
Yes I did that and the search results were not like the micromouse I have seen on youtube that compete on national or international level that's why I had to ask help from you guys
Why would you write such a false statement here when a simple search yields many DIY sites with step-by-step instructions for parts, building and programming, and even a mms simulator. Buy one on-line, scratch off the name, put your name on it.
Those are all custom made by the competitors.
You are not ready to make a custom micromouse, and you can't buy one designed for the national or international competitions, so start with one of the many simpler kits and learn the basics.
You never tried.
https://bulebule.readthedocs.io/en/latest/building.html
This topic was automatically closed 180 days after the last reply. New replies are no longer allowed.