Potentiometer value is updated only before pressing button gotoPositionAPin or gotoPositionBPin can't change value of speed and aceleration during go to position.
/*
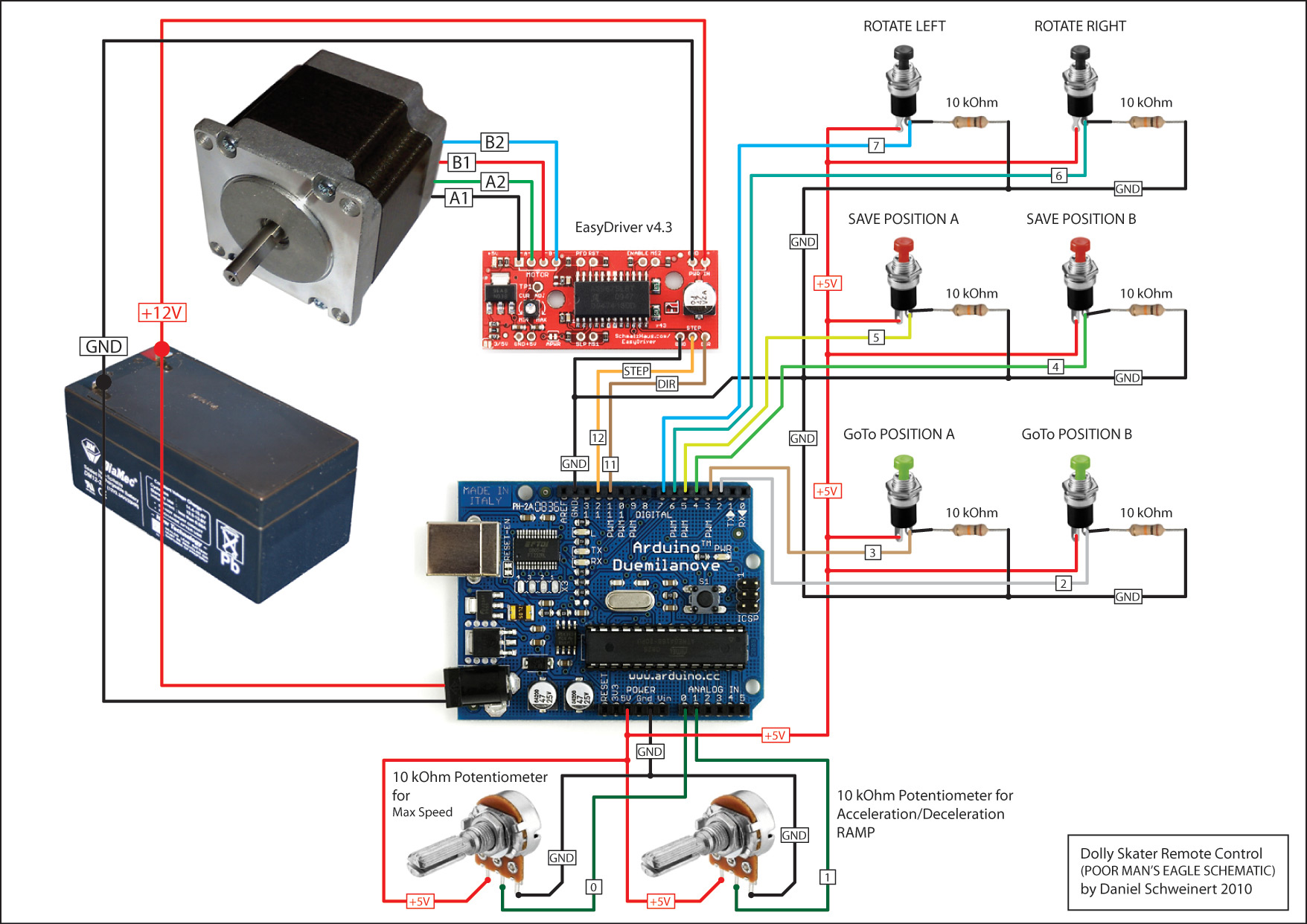
Stepper Motor Single Channel Manual Controller
language: Wiring/Arduino
This program drives a single bi-polar stepper motor using an EasyDriver
stepper motor controller from SparkFun.
It takes input from a set of switches and potentiometers.
The goal is to create smooth motion of the steppper motor without having a
PC attached to the Arduino.
The motor moves 1600 steps in one rotation. (8th step microstepping on a 200 s/r motor)
Created 08/18/2010
by Brian Schmalz
Version 0.2 01/30/2011 Added accel/decl
Version 0.3 10/09/2011 Fixed two bugs found by Daniel Schweinert:
1) Speed Pot not working during Rotate Left or Rotate Right moves
2) When Goto A or Goto B is pressed after using Rotate Left or Right, motor moves in the
wrong directly for a little bit before moving in the right direction.
*/
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
#include <AccelStepper.h>
#define OLED_Address 0x3C
Adafruit_SSD1306 oled(1);
AccelStepper stepper1(1, 12, 11);
#define stepsPerRev 5000
#define stepPin 12
#define dirPin 11
#define ledPin 13
#define rotateLeftPin 7
#define rotateRightPin 6
#define savePositionAPin 5
#define savePositionBPin 4
#define gotoPositionAPin 3
#define gotoPositionBPin 2
#define maxSpeedPin 0
#define accelPin 1
// Set this to zero if you don't want debug messages printed
#define printDebug 1
// These are the constants that define the speed associated with the MaxSpeed pot
#define MAX_STEPS_PER_SECOND 1000 // At 200 s/r and 1/8th microstepping, this will be 333 rev/minute
#define MIN_STEPS_PER_SECOND 27 // At 200 steps/rev and 1/8th microstepping, this will be 1 rev/minute
// Change this value to scale the acceleration pot's scaling factor
#define ACCEL_RATIO 1
int buttonState = 0;
int stepNumber = 0;
int curSpeed = 100;
int dir = 0;
int maxSpeed = 0;
int accel = 0;
long savedPosA = 0;
long savedPosB = 0;
int loopCtr = 0;
float fMaxSpeed = 0.0;
float fStepsPerSecond = 0.0;
void setup()
{
oled.begin(SSD1306_SWITCHCAPVCC, OLED_Address);
pinMode(stepPin, OUTPUT);
pinMode(dirPin, OUTPUT);
pinMode(ledPin, OUTPUT);
pinMode(rotateLeftPin, INPUT);
pinMode(rotateRightPin, INPUT);
pinMode(savePositionAPin, INPUT);
pinMode(savePositionBPin, INPUT);
pinMode(gotoPositionAPin, INPUT);
pinMode(gotoPositionBPin, INPUT);
if (printDebug)
{
// Initialize the Serial port
Serial.begin(9600);
}
// blink the LED:
blink(2);
stepper1.setMaxSpeed(800.0);
stepper1.setAcceleration(600.0);
// Grab both speed and accel before we start
maxSpeed = analogRead(maxSpeedPin);
// Do the math to scale the 0-1023 value (maxSpeed) to
// a range of MIN_STEPS_PER_SECOND to MAX_STEPS_PER_SECOND
fMaxSpeed = maxSpeed / 1023.0;
fStepsPerSecond = MIN_STEPS_PER_SECOND + (fMaxSpeed * (MAX_STEPS_PER_SECOND - MIN_STEPS_PER_SECOND));
if (fStepsPerSecond > 1000)
{
fStepsPerSecond = 1000;
}
accel = analogRead(accelPin)/ACCEL_RATIO;
}
void loop()
{
oled.clearDisplay();
oled.setTextSize(1); // Normal 1:1 pixel scale
oled.setTextColor(WHITE);
// First, we need to see if either rotate button is down. They always take precidence.
if(digitalRead(rotateLeftPin))
{
stepper1.setSpeed(-fStepsPerSecond);
while(digitalRead(rotateLeftPin))
{
CheckPots();
stepper1.runSpeed();
stepper1.setSpeed(-fStepsPerSecond);
}
}
else if (digitalRead(rotateRightPin))
{
stepper1.setSpeed(fStepsPerSecond);
while(digitalRead(rotateRightPin))
{
CheckPots();
stepper1.runSpeed();
stepper1.setSpeed(fStepsPerSecond);
}
}
// Go see if we need to update our analog conversions
CheckPots();
// Check to see if user is trying to save position A or B
if(digitalRead(savePositionAPin))
{
savedPosA = stepper1.currentPosition();
if (printDebug)
{
oled.setCursor(1, 10);
oled.print("Saved A at : ");
oled.println(savedPosA);
oled.display();
}
while(digitalRead(savePositionAPin));
}
if(digitalRead(savePositionBPin))
{
savedPosB = stepper1.currentPosition();
if (printDebug)
{
oled.setCursor(10, 10);
oled.print("Saved B at : ");
oled.println(savedPosB);
oled.display();
}
while(digitalRead(savePositionBPin));
}
// Check to see if the user wants to go to position A or B
if (digitalRead(gotoPositionAPin))
{
if (printDebug)
{
// Yup, let's go to position A
oled.setCursor(10, 0);
oled.print("cur pos = ");
oled.println(stepper1.currentPosition());
oled.print("Going to A = ");
oled.println(savedPosA);
oled.print("Speed = ");
oled.println(fStepsPerSecond);
oled.print("Accel = ");
oled.println(accel);
oled.display();
}
stepper1.setAcceleration(0);
stepper1.runToNewPosition(stepper1.currentPosition());
stepper1.setMaxSpeed(fStepsPerSecond);
stepper1.setAcceleration(accel);
stepper1.runToNewPosition(savedPosA);
if (printDebug)
{
oled.clearDisplay();
oled.setTextSize(2); // Normal 1:1 pixel scale
oled.setTextColor(WHITE);
oled.setCursor(10, 0);
oled.print("new pos = ");
oled.println(stepper1.currentPosition());
oled.display();
}
while(digitalRead(gotoPositionAPin));
}
else if (digitalRead(gotoPositionBPin))
{
// Yup, let's go to position B
if (printDebug)
{
oled.setCursor(0, 0);
oled.print("cur pos = ");
oled.println(stepper1.currentPosition());
oled.print("Going to B = ");
oled.println(savedPosB);
oled.print("Speed = ");
oled.println(fStepsPerSecond);
oled.print("Accel = ");
oled.println(accel);
oled.display();
}
stepper1.setAcceleration(0);
stepper1.runToNewPosition(stepper1.currentPosition());
stepper1.setMaxSpeed(fStepsPerSecond);
stepper1.setAcceleration(accel);
stepper1.runToNewPosition(savedPosB);
if (printDebug)
{
oled.clearDisplay();
oled.setTextSize(2); // Normal 1:1 pixel scale
oled.setTextColor(WHITE);
oled.setCursor(0, 0);
oled.print("new pos = ");
oled.println(stepper1.currentPosition());
oled.display();
}
while(digitalRead(gotoPositionBPin));
}
}
// Blink the reset LED:
void blink(int howManyTimes)
{
int i;
for (i=0; i < howManyTimes; i++)
{
digitalWrite(ledPin, HIGH);
delay(200);
digitalWrite(ledPin, LOW);
delay(200);
}
}
void CheckPots(void)
{
loopCtr++;
// Only read these once in a while because they take a LONG time
if (loopCtr == 100)
{
maxSpeed = analogRead(maxSpeedPin);
// Do the math to scale the 0-1023 value (maxSpeed) to
// a range of MIN_STEPS_PER_SECOND to MAX_STEPS_PER_SECOND
fMaxSpeed = maxSpeed / 1023.0;
fStepsPerSecond = MIN_STEPS_PER_SECOND + (fMaxSpeed * (MAX_STEPS_PER_SECOND - MIN_STEPS_PER_SECOND));
if (fStepsPerSecond > 1000)
{
fStepsPerSecond = 1000;
}
}
// Read in the acceleration analog value
// This needs to be scaled too, but to what?
if (loopCtr >= 200)
{
accel = analogRead(accelPin)/ACCEL_RATIO;
loopCtr = 0;
}
}