I'm attempting to run a Nema 8 stepper motor with a Gearshaft, via an A4988 Pololu stepper motor driver, on an Arduino Uno R3.
Datasheets:
- Nema 8 stepper motor w/ Gearshaft:
8HS15-0604S-PG90.pdf (144.5 KB) - A4988 motor driver from Pololu:
https://www.pololu.com/file/0J450/A4988.pdf - Arduino Uno R3:
https://docs.arduino.cc/resources/datasheets/A000066-datasheet.pdf
I connected the motor and the driver to my Arduino using the simple stepper motor setup, according to the following standard configuration, which I normally use for all my stepper motors:

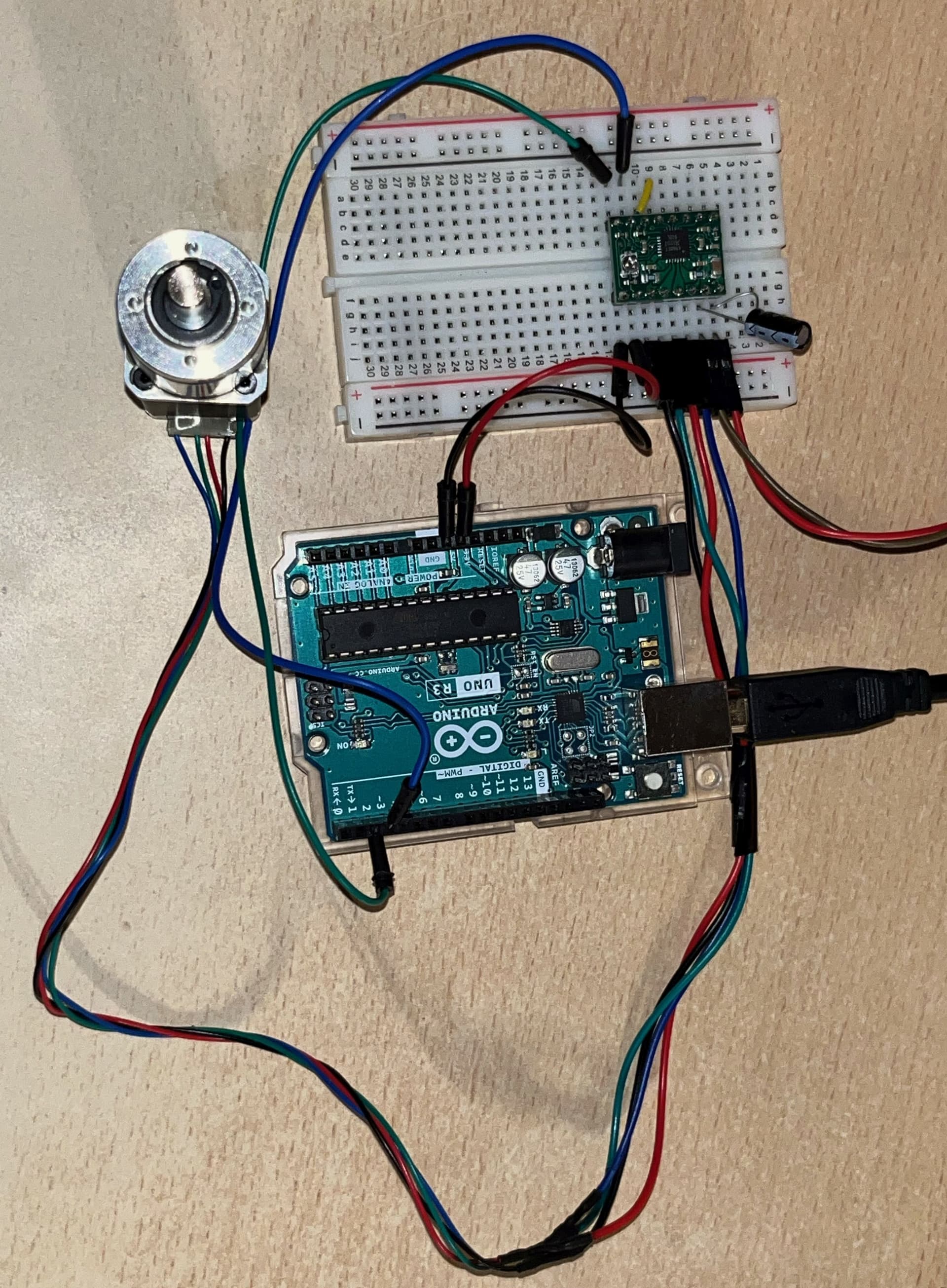
Here is an image of my specific setup:
I'm applying 15V via my DC power supply to the VMOT pins on the A4988 motor driver, alongside a 100 uF capacitor between the two VMOT pins.
I'm running it with the following code on the Arduino IDE:
const int dirPin = 2;
const int stepPin = 3;
const int stepNum = 400;
const int stepDelay = 800;
void setup() {
Serial.begin(9600);
pinMode(dirPin, OUTPUT);
pinMode(stepPin, OUTPUT);
}
void loop() {
digitalWrite(dirPin, HIGH);
Serial.println("Spinning!");
for (int i = 0; i < stepNum; i++)
{
digitalWrite(stepPin, HIGH);
delayMicroseconds(stepDelay);
digitalWrite(stepPin, LOW);
delayMicroseconds(stepDelay);
}
delay(1000);
}
The setup above allows me to spin my Nema 8 motor with the intended spin direction and duration. However, I'm running into an issue where the torque exerted by the motor while it's stepping is very weak. It's so weak I'm able to halt and slip the shaft of the motor with my fingers, and it's even stranger due to the fact that the holding torque of the motor (torque exterted while it's not stepping) is very strong. I'm not able to dislodge the shaft with my fingers while the motor is holding. Therefore, it is only the stepping torque that appears to be affacted by this weakness...
I have never encountered this issue before, but I've only worked with Nema 17 stepper motors up to now. I have never had a motor exert this strong of a holding torque, and this weak of a stepping torque at the same time.
My first thought was to try out all possible stepping delay durations, and see whether there was a tight sweet spot where the strong stepping torque would step in. I devised a test where I would incrementally increase the stepping delay every few spins in a loop, and found that the torque appeared to be the strongest in the area between 800 and 900 microseconds of stepping delay. Albeit, the torque was still not strong enough to not be stopped or slipped by my fingers.
My next thought was to try and microstep the motor, using the 3 "MS" pins on the A4988 driver. What I found there was even more interesting, where the Quarter Step and Eighth Step actually menaged to extert a lot more torque compared to the Full Step configuration, almost being able to slip through my fingers. It was still not strong enough as I need it to be though unfortunately.
At this point I'm out of ideas.
What am I doing wrong here? Am I missing a certain part of the setup that geared stepper motors, such as this Nema 8, require in order to exert their full torque force?
Thanks for reading my post, any guidance is appreciated.





