/* Arduino Multiple Servo Motors Control Using The PCA9685 PWM Module VERSION 1 PROPORTIONAL
Created by Yvan / https://Brainy-Bits.com
This code is in the public domain...
You can: copy it, use it, modify it, share it or just plain ignore it!
Thx!
*/
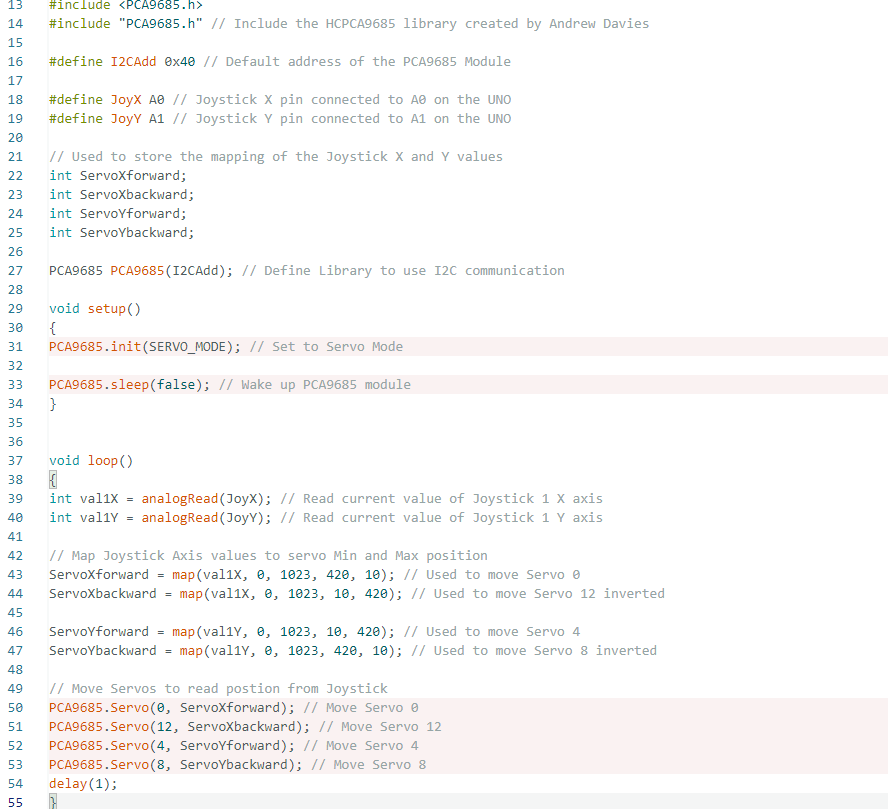
#include "PCA9685.h" // Include the HCPCA9685 library created by Andrew Davies
#define I2CAdd 0x40 // Default address of the PCA9685 Module
#define JoyX A0 // Joystick X pin connected to A0 on the UNO
#define JoyY A1 // Joystick Y pin connected to A1 on the UNO
// Used to store the mapping of the Joystick X and Y values
int ServoXforward;
int ServoXbackward;
int ServoYforward;
int ServoYbackward;
PCA9685 PCA9685(I2CAdd); // Define Library to use I2C communication
void setup()
{
HCPCA9685.Init(SERVO_MODE); // Set to Servo Mode
HCPCA9685.Sleep(false); // Wake up PCA9685 module
}
void loop()
{
int val1X = analogRead(JoyX); // Read current value of Joystick 1 X axis
int val1Y = analogRead(JoyY); // Read current value of Joystick 1 Y axis
// Map Joystick Axis values to servo Min and Max position
ServoXforward = map(val1X, 0, 1023, 420, 10); // Used to move Servo 0
ServoXbackward = map(val1X, 0, 1023, 10, 420); // Used to move Servo 12 inverted
ServoYforward = map(val1Y, 0, 1023, 10, 420); // Used to move Servo 4
ServoYbackward = map(val1Y, 0, 1023, 420, 10); // Used to move Servo 8 inverted
// Move Servos to read postion from Joystick
HCPCA9685.Servo(0, ServoXforward); // Move Servo 0
HCPCA9685.Servo(12, ServoXbackward); // Move Servo 12
HCPCA9685.Servo(4, ServoYforward); // Move Servo 4
HCPCA9685.Servo(8, ServoYbackward); // Move Servo 8
delay(1);
}
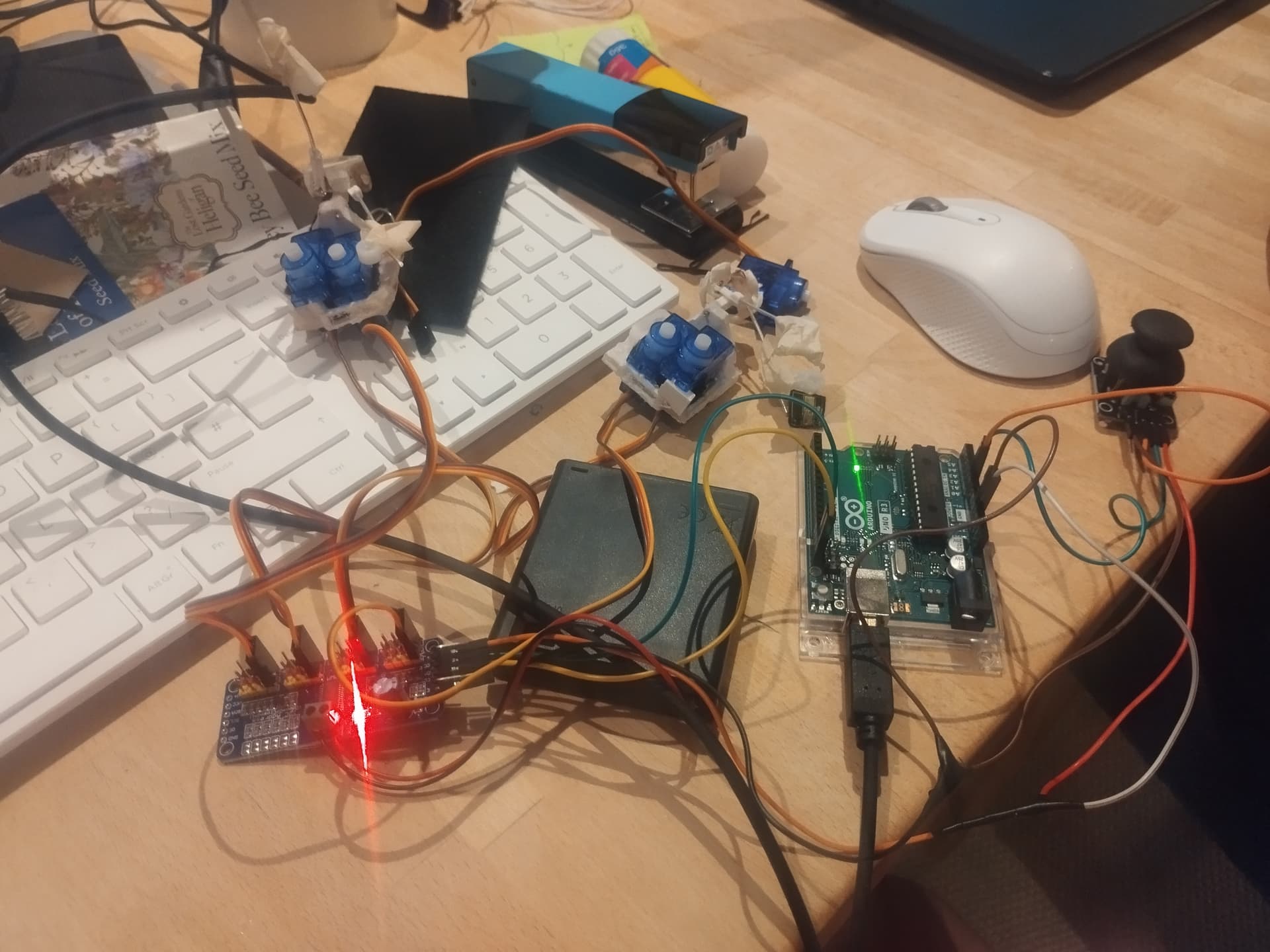
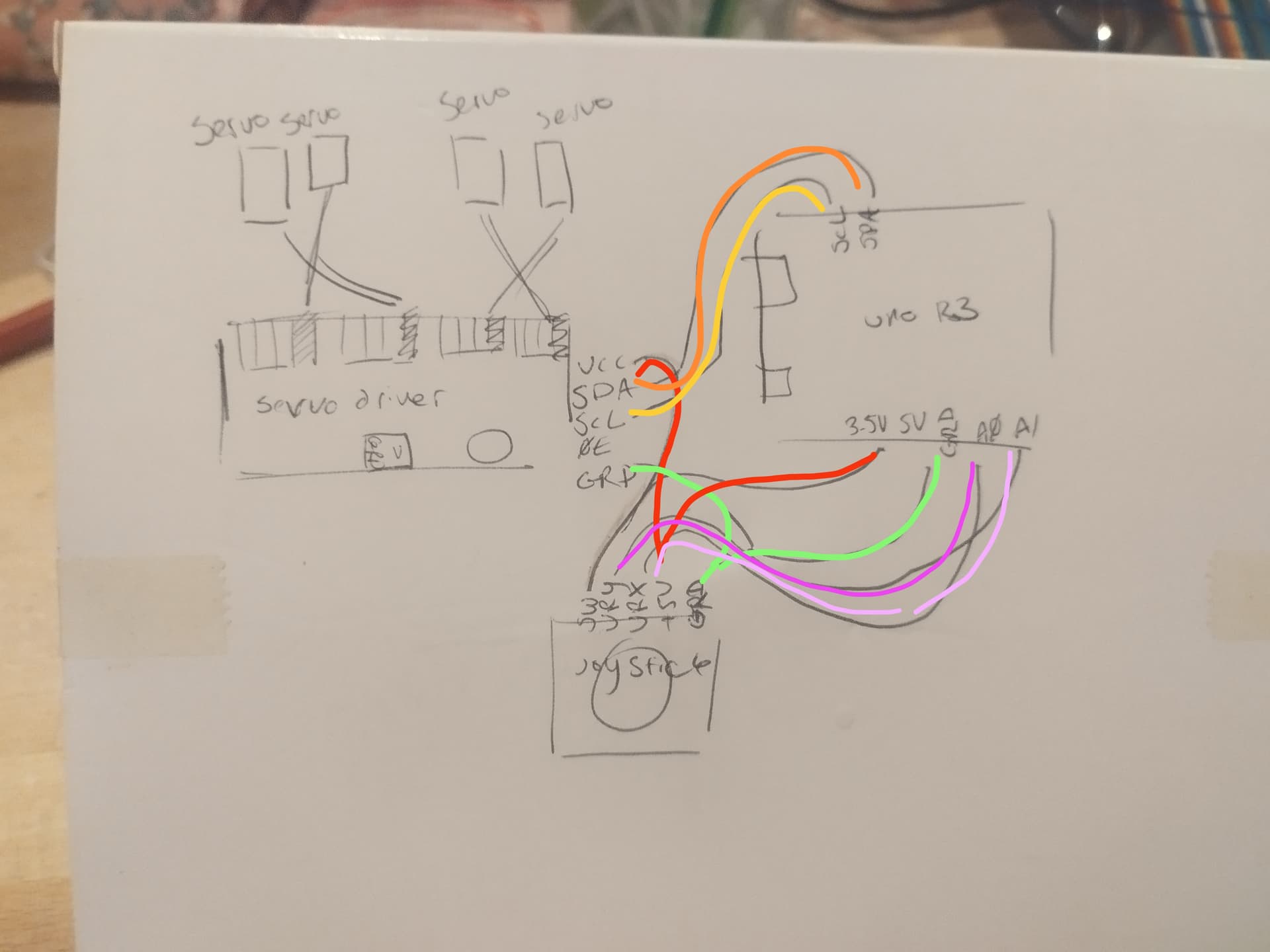
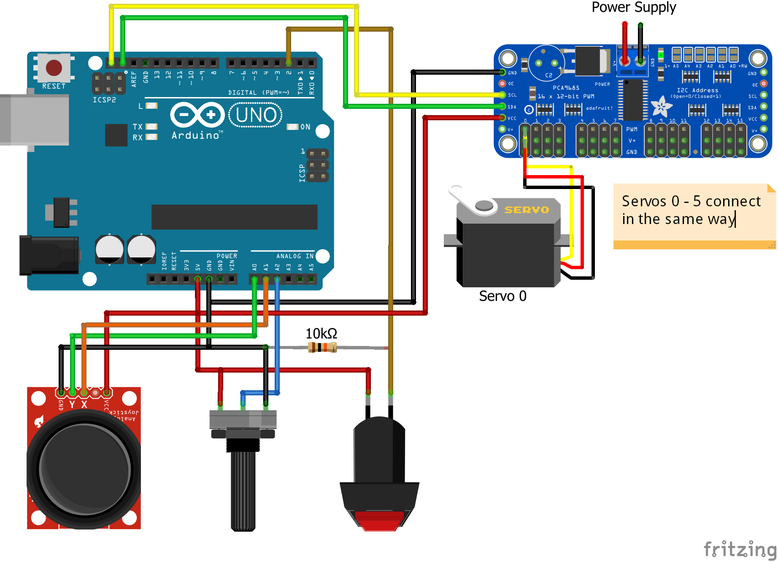
This is the code I want to be able to use but doesn't seem to work.