Hello guys,
I have been trying to make it work for days, but I cant. It looks like the arduino is connecting well with the modules, but are cant figure out why they are not communicating each other.
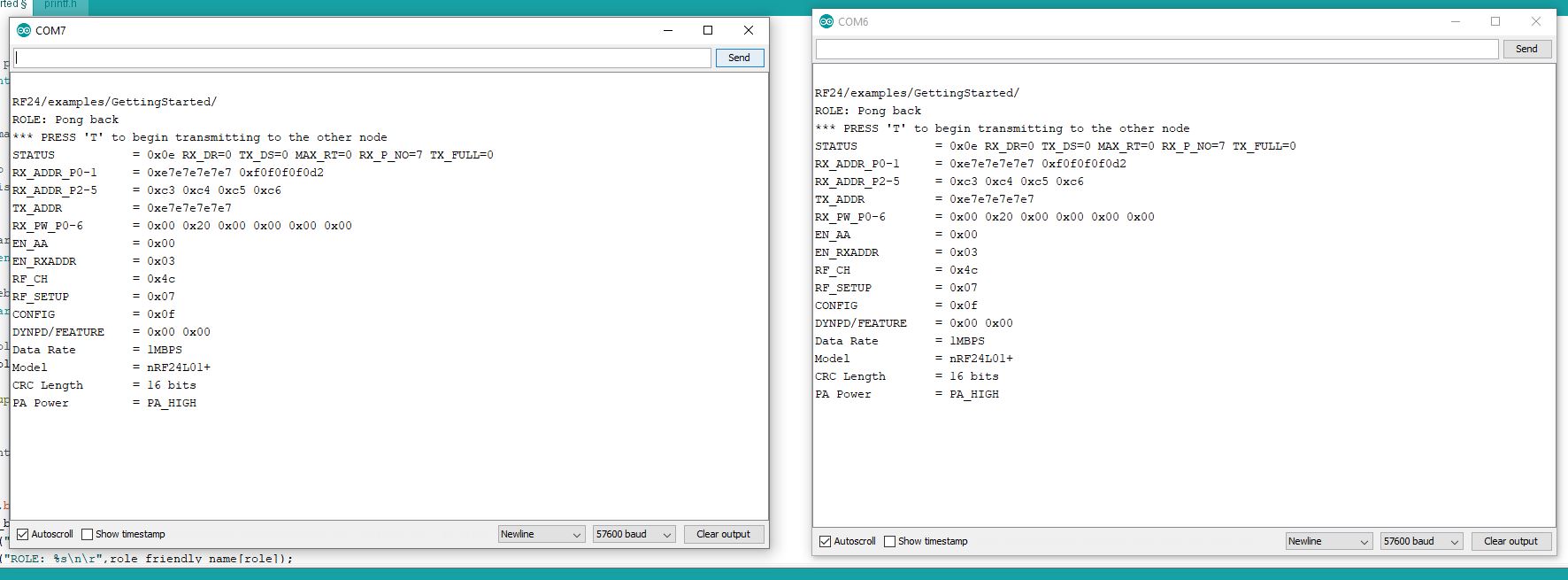
Each one is connected in port, here are the radio.print():
Please download it, url not working.
Are the adress wrong?

Here the code I am using:
/*
Copyright (C) 2011 J. Coliz <maniacbug@ymail.com>
This program is free software; you can redistribute it and/or
modify it under the terms of the GNU General Public License
version 2 as published by the Free Software Foundation.
*/
/**
* Example for Getting Started with nRF24L01+ radios.
*
* This is an example of how to use the RF24 class. Write this sketch to two
* different nodes. Put one of the nodes into 'transmit' mode by connecting
* with the serial monitor and sending a 'T'. The ping node sends the current
* time to the pong node, which responds by sending the value back. The ping
* node can then see how long the whole cycle took.
*/
#include <SPI.h>
#include "nRF24L01.h"
#include "RF24.h"
#include "printf.h"
//
// Hardware configuration
//
// Set up nRF24L01 radio on SPI bus plus pins 9 & 10
RF24 radio(9,10);
//
// Topology
//
// Radio pipe addresses for the 2 nodes to communicate.
const uint64_t pipes[2] = { 0xF0F0F0F0E1LL, 0xF0F0F0F0D2LL };
//
// Role management
//
// Set up role. This sketch uses the same software for all the nodes
// in this system. Doing so greatly simplifies testing.
//
// The various roles supported by this sketch
typedef enum { role_ping_out = 1, role_pong_back } role_e;
// The debug-friendly names of those roles
const char* role_friendly_name[] = { "invalid", "Ping out", "Pong back"};
// The role of the current running sketch
role_e role = role_pong_back;
void setup(void)
{
//
// Print preamble
//
Serial.begin(57600);
printf_begin();
printf("\n\rRF24/examples/GettingStarted/\n\r");
printf("ROLE: %s\n\r",role_friendly_name[role]);
printf("*** PRESS 'T' to begin transmitting to the other node\n\r");
//
// Setup and configure rf radio
//
radio.begin();
radio.setAutoAck(false);
// optionally, increase the delay between retries & # of retries
radio.setRetries(15,15);
// optionally, reduce the payload size. seems to
// improve reliability
//radio.setPayloadSize(8);
//
// Open pipes to other nodes for communication
//
// This simple sketch opens two pipes for these two nodes to communicate
// back and forth.
// Open 'our' pipe for writing
// Open the 'other' pipe for reading, in position #1 (we can have up to 5 pipes open for reading)
//if ( role == role_ping_out )
{
//radio.openWritingPipe(pipes[0]);
radio.openReadingPipe(1,pipes[1]);
}
//else
{
//radio.openWritingPipe(pipes[1]);
//radio.openReadingPipe(1,pipes[0]);
}
//
// Start listening
//
radio.startListening();
//
// Dump the configuration of the rf unit for debugging
//
radio.printDetails();
}
void loop(void)
{
//
// Ping out role. Repeatedly send the current time
//
if (role == role_ping_out)
{
// First, stop listening so we can talk.
radio.stopListening();
// Take the time, and send it. This will block until complete
unsigned long time = millis();
printf("Now sending %lu...",time);
bool ok = radio.write( &time, sizeof(unsigned long) );
if (ok)
printf("ok...");
else
printf("failed.\n\r");
// Now, continue listening
radio.startListening();
// Wait here until we get a response, or timeout (250ms)
unsigned long started_waiting_at = millis();
bool timeout = false;
while ( ! radio.available() && ! timeout )
if (millis() - started_waiting_at > 200 )
timeout = true;
// Describe the results
if ( timeout )
{
printf("Failed, response timed out.\n\r");
}
else
{
// Grab the response, compare, and send to debugging spew
unsigned long got_time;
radio.read( &got_time, sizeof(unsigned long) );
// Spew it
printf("Got response %lu, round-trip delay: %lu\n\r",got_time,millis()-got_time);
}
// Try again 1s later
delay(1000);
}
//
// Pong back role. Receive each packet, dump it out, and send it back
//
if ( role == role_pong_back )
{
// if there is data ready
if ( radio.available() )
{
// Dump the payloads until we've gotten everything
unsigned long got_time;
bool done = false;
while (!done)
{
// Fetch the payload, and see if this was the last one.
done = radio.read( &got_time, sizeof(unsigned long) );
// Spew it
printf("Got payload %lu...",got_time);
// Delay just a little bit to let the other unit
// make the transition to receiver
delay(20);
}
// First, stop listening so we can talk
radio.stopListening();
// Send the final one back.
radio.write( &got_time, sizeof(unsigned long) );
printf("Sent response.\n\r");
// Now, resume listening so we catch the next packets.
radio.startListening();
}
}
//
// Change roles
//
if ( Serial.available() )
{
char c = toupper(Serial.read());
if ( c == 'T' && role == role_pong_back )
{
printf("*** CHANGING TO TRANSMIT ROLE -- PRESS 'R' TO SWITCH BACK\n\r");
// Become the primary transmitter (ping out)
role = role_ping_out;
radio.openWritingPipe(pipes[0]);
radio.openReadingPipe(1,pipes[1]);
}
else if ( c == 'R' && role == role_ping_out )
{
printf("*** CHANGING TO RECEIVE ROLE -- PRESS 'T' TO SWITCH BACK\n\r");
// Become the primary receiver (pong back)
role = role_pong_back;
radio.openWritingPipe(pipes[1]);
radio.openReadingPipe(1,pipes[0]);
}
}
}
// vim:cin:ai:sts=2 sw=2 ft=cpp