// C++ code
//
#include <Servo.h>
Servo servo;
Servo servo1;
Servo servo2;
Servo servo3;
#define button 7
bool buttonState = 0;
void setup(){
pinMode(button, INPUT_PULLUP);
pinMode(3, OUTPUT);
pinMode(6, OUTPUT);
pinMode(9, OUTPUT);
pinMode(11, OUTPUT);
servo.attach(3);
servo1.attach(6);
servo2.attach(9);
servo3.attach(11);
servo.write(90);
servo1.write(90);
servo2.write(90);
servo3.write(90);
}
void loop(){
if (digitalRead(button == LOW)){
servo.write(60);
servo1.write(120);
servo2.write(60);
servo3.write(120);
delay(500);
servo.write(120);
servo1.write(60);
servo2.write(120);
servo3.write(60);
}
}
Seja mais claro sobre sua dificuldade.
O que ocorre com seu projeto e o que deveria ocorrer?
Recomendo a leitura do tópico:
Olá! Bem vindo ao Fórum.
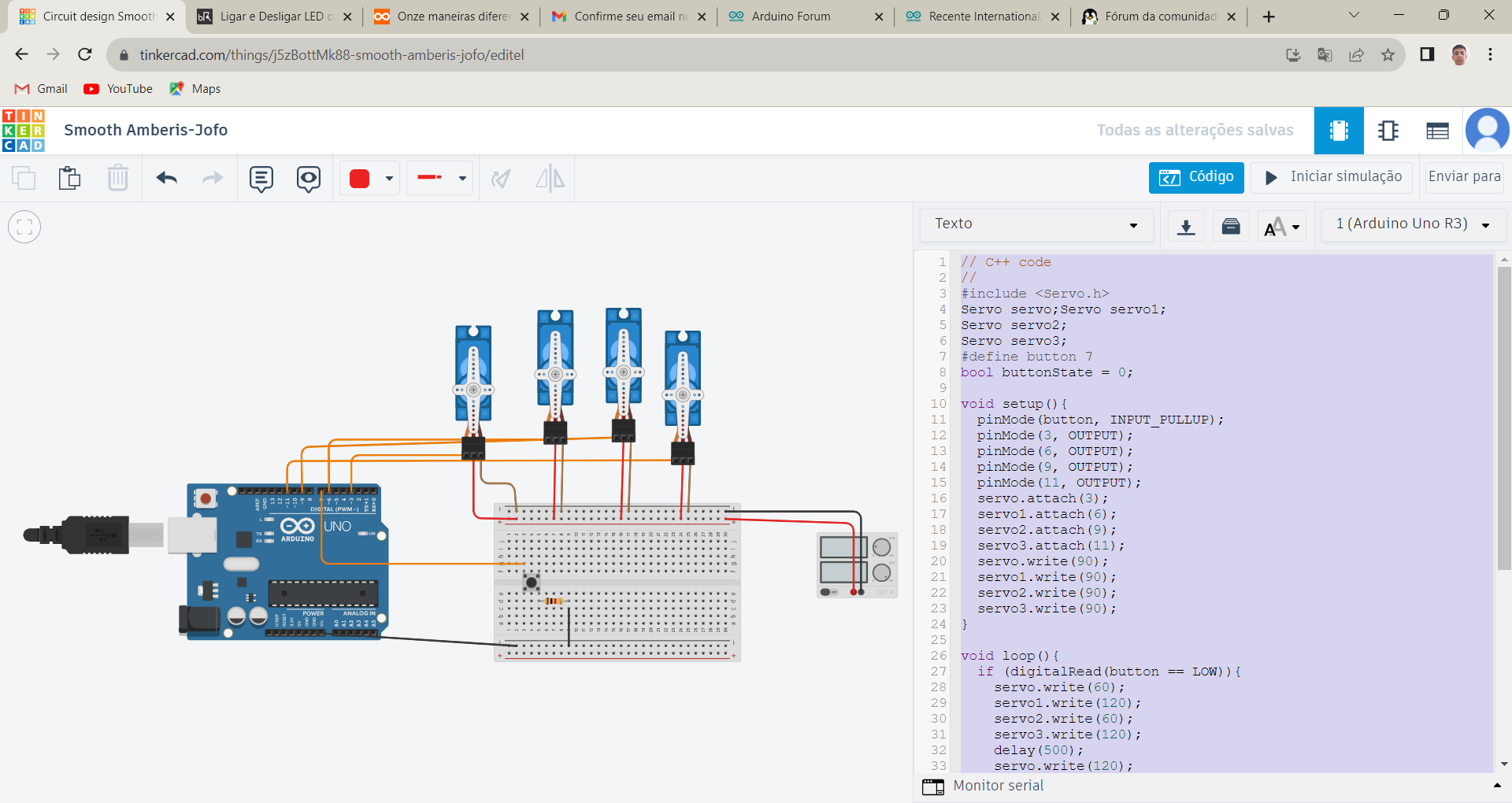
Como o @ruilviana disse, é preciso que você seja mais específico ao enviar seus questionamentos, mas há três coisas em seu projeto que eu notei:
-
Se você configurou o pino do botão (Pino 7 ) como INPUT_PULLUP, pode ligar o outro lado ao GND sem precisar de um resistor. Não é grande coisa, mas é menos um componente no seu circuito.
-
É preciso ligar o GND dos servos ao GND do Arduino.
-
Dê uma olhada com bastante cuidado nos parênteses dessa linha:
Divirta-se! ![]()
This topic was automatically closed 180 days after the last reply. New replies are no longer allowed.