Hi there, I'm trying to generate an Arduino code for a system consists of
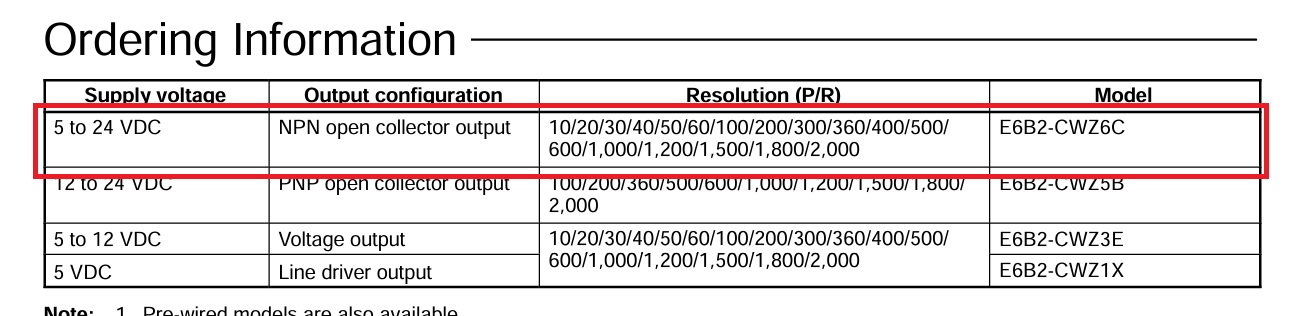
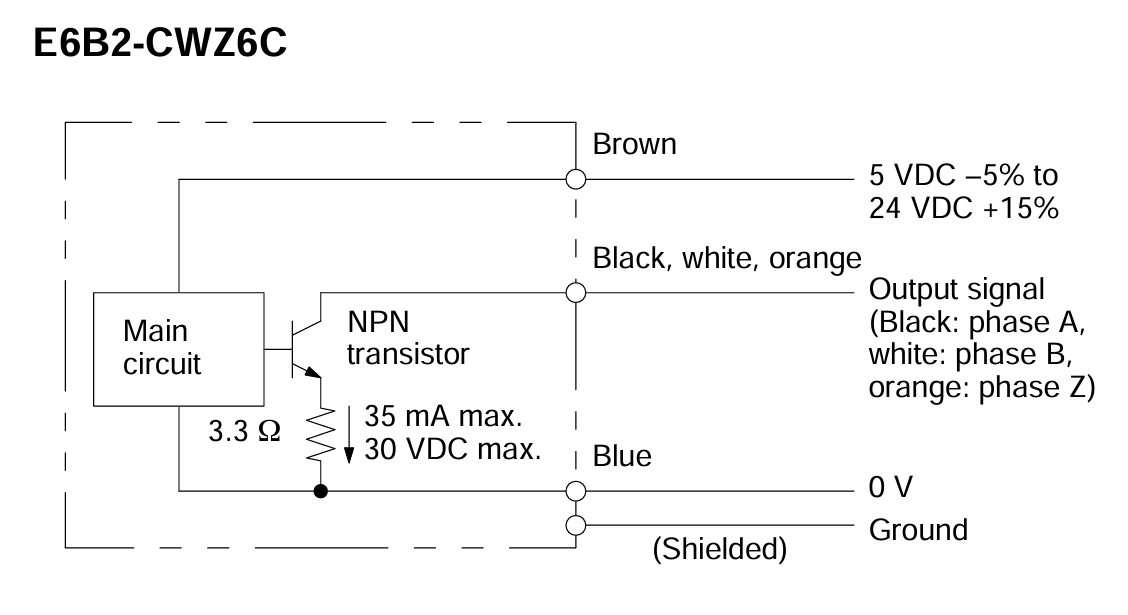
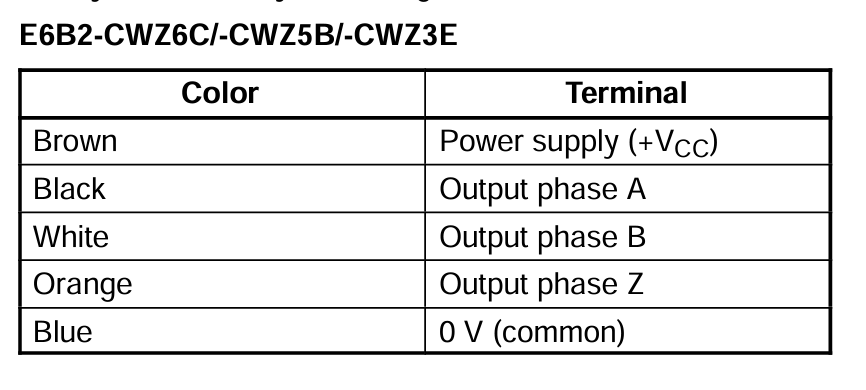
1- Omron encoder 1000P/R (E6B2-CWZ6C)
2- Arduino Uno board
3- Led 5v
and I want this code to let the led on every one revolution of the encoder and the serial monitor shows the degrees of encoder rotation, number of rotations, and the status of led if on or off.
the code below gives zero and led is off always
// Define the pin connections
const int encoderPinA = 2; // Encoder A output connected to digital pin 2
const int encoderPinB = 3; // Encoder B output connected to digital pin 3
const int encoderPinZ = 4; // Encoder Z output connected to digital pin 4
const int ledPin = 13; // LED connected to digital pin 13
volatile long pulseCount = 0; // Variable to store the number of pulses
volatile long rotationCount = 0; // Variable to store the number of rotations
const int pulsesPerRotation = 1000; // Number of pulses per rotation
volatile bool ledState = false; // Variable to store the LED state
void setup() {
// Set the pin modes
pinMode(encoderPinA, INPUT_PULLUP);
pinMode(encoderPinB, INPUT_PULLUP);
pinMode(encoderPinZ, INPUT_PULLUP);
pinMode(ledPin, OUTPUT);
// Initialize the LED state
digitalWrite(ledPin, LOW);
// Initialize serial communication for debugging
Serial.begin(9600);
// Attach interrupts to the encoder pins
attachInterrupt(digitalPinToInterrupt(encoderPinA), countPulse, RISING);
attachInterrupt(digitalPinToInterrupt(encoderPinZ), handleIndexPulse, RISING);
}
void loop() {
// Disable interrupts temporarily to safely read pulseCount and rotationCount
noInterrupts();
long localPulseCount = pulseCount;
long localRotationCount = rotationCount;
bool localLedState = ledState;
interrupts();
// Calculate the degrees of rotation
float degrees = (localPulseCount % pulsesPerRotation) * (360.0 / pulsesPerRotation);
// Print the status to the serial monitor
Serial.print("Degrees: ");
Serial.print(degrees);
Serial.print(", Rotations: ");
Serial.print(localRotationCount);
Serial.print(", LED: ");
Serial.println(localLedState ? "ON" : "OFF");
// Add a small delay to avoid flooding the serial monitor
delay(500);
}
// Interrupt service routine to count pulses on channel A
void countPulse() {
// Read the B channel to determine the direction
if (digitalRead(encoderPinB) == LOW) {
pulseCount++;
} else {
pulseCount--;
}
}
// Interrupt service routine to handle index pulses on channel Z
void handleIndexPulse() {
// Increment rotation count
rotationCount++;
// Toggle the LED state
ledState = !ledState;
// Flash the LED
digitalWrite(ledPin, HIGH);
delay(100); // LED on for 100 milliseconds
digitalWrite(ledPin, LOW);
// Print a message to the serial monitor
Serial.println("Index pulse detected");
// Debug statement
Serial.print("Rotation Count: ");
Serial.println(rotationCount);
}
"
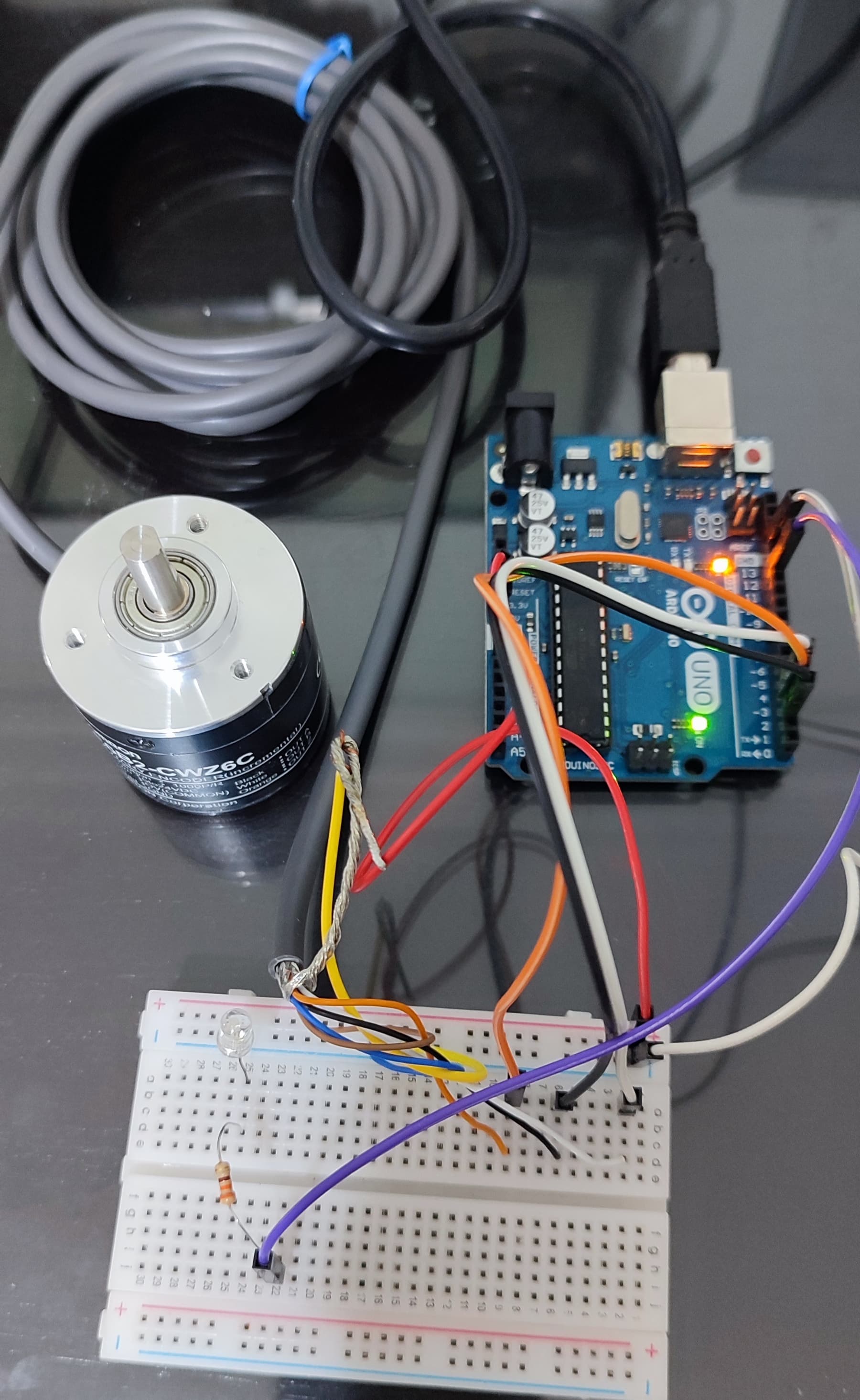
Can you please post a copy of your circuit, a picture of a hand drawn circuit in jpg, png?
Hand drawn and photographed is perfectly acceptable.
Please include ALL hardware, power supplies, component names and pin labels.
thanks for you all, the connections are shown , and i modified the code for the next step, but still the led is not blinking at each rotation and its status in serial monitor is on for whole the rotation and off for whole the next rotation, and i want it to only blinks when single rotation is completed , i will also add camera to take a picture but not included yet.
// Define the pin connections
const int encoderPinA = 2; // Encoder A output connected to digital pin 2
const int encoderPinB = 4; // Encoder B output connected to digital pin 3
const int encoderPinZ = 3; // Encoder Z output connected to digital pin 4
const int ledPin = 12; // LED connected to digital pin 13
const int cameraPin = 7; // Camera trigger pin connected to digital pin 7
volatile long pulseCount = 0; // Variable to store the number of pulses
volatile long rotationCount = 0; // Variable to store the number of rotations
const int pulsesPerRotation = 1000; // Number of pulses per rotation
volatile bool ledState = false; // Variable to store the LED state
void setup() {
// Set the pin modes
pinMode(encoderPinA, INPUT_PULLUP);
pinMode(encoderPinB, INPUT_PULLUP);
pinMode(encoderPinZ, INPUT_PULLUP);
pinMode(ledPin, OUTPUT);
pinMode(cameraPin, OUTPUT);
// Initialize the LED and Camera states
digitalWrite(ledPin, LOW);
digitalWrite(cameraPin, LOW);
// Initialize serial communication for debugging
Serial.begin(9600);
// Attach interrupts to the encoder pins
attachInterrupt(digitalPinToInterrupt(encoderPinA), countPulse, RISING);
attachInterrupt(digitalPinToInterrupt(encoderPinZ), handleIndexPulse, RISING);
}
void loop() {
// Disable interrupts temporarily to safely read pulseCount and rotationCount
noInterrupts();
long localPulseCount = pulseCount;
long localRotationCount = rotationCount;
bool localLedState = ledState;
interrupts();
// Calculate the degrees of rotation
float degrees = (localPulseCount % pulsesPerRotation) * (360.0 / pulsesPerRotation);
// Print the status to the serial monitor
Serial.print("Degrees: ");
Serial.print(degrees);
Serial.print(", Rotations: ");
Serial.print(localRotationCount);
Serial.print(", LED: ");
Serial.println(localLedState ? "ON" : "OFF");
// Add a small delay to avoid flooding the serial monitor
delay(500);
}
// Interrupt service routine to count pulses on channel A
void countPulse() {
// Read the B channel to determine the direction
if (digitalRead(encoderPinB) == LOW) {
pulseCount++;
} else {
pulseCount--;
}
}
// Interrupt service routine to handle index pulses on channel Z
void handleIndexPulse() {
// Increment rotation count
rotationCount++;
// Flash the LED
digitalWrite(ledPin, HIGH);
delay(100); // LED on for 100 milliseconds
digitalWrite(ledPin, LOW);
// Trigger the camera to take a picture
digitalWrite(cameraPin, HIGH);
delay(100); // Camera trigger pulse duration
digitalWrite(cameraPin, LOW);
// Update the LED state
ledState = !ledState;
// Print a message to the serial monitor
Serial.println("Index pulse detected");
// Debug statement
Serial.print("Rotation Count: ");
Serial.println(rotationCount);
}