This thread has morphed to the PortentaH7 so probably best to continue it here. Error compiling for board Arduino Mega or Mega 2560 - #48 by jerteach
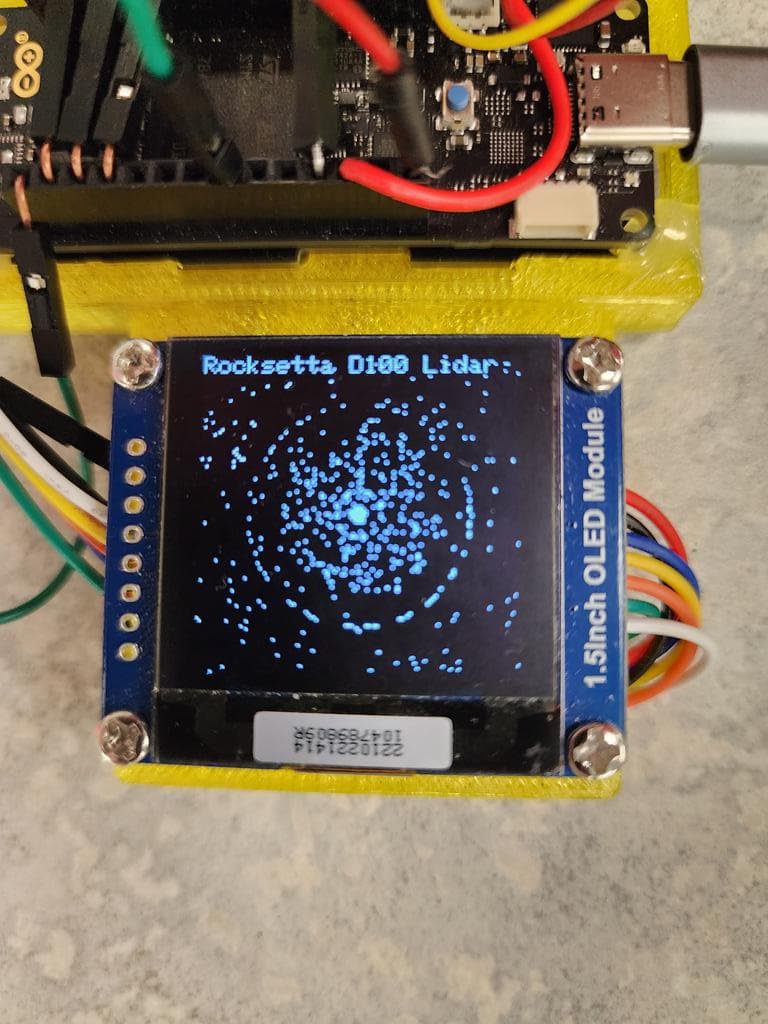
So I got this Lidar D100 kit from LdRobot and I have connected it to my PortentaH7 with WaveShare Grayscale 128x128 OLED and using a 9 year old library called RPLidarDriver I have some results.

but the windows viewer is really very good this twitter feed here, and what I am getting is not much better than random dots.
My github for reseqarch on the Lidar Sensor is at d100-ldrobot-lidar-ld14 . It is very strange that the library I have works at all, but I have found another library LD06forArduino.ino that seems much closer to what I need and the math looks better.
I am going to keep working on it, but any suggestions would be appreciated. It is very strange that this amazing Lidar sensor does not have a good Arduino library to go with it.
Here is my latest code, but the results are not much good.
/*
* RoboPeak RPLIDAR Arduino Example
* This example shows the easy and common way to fetch data from an RPLIDAR
*
* You may freely add your application code based on this template
*
* USAGE:
* ---------------------------------
* 1. Download this sketch code to your Arduino board
* 2. Connect the RPLIDAR's serial port (RX/TX/GND) to your Arduino board (Pin 0 and Pin1)
* 3. Connect the RPLIDAR's motor ctrl pin to the Arduino board pin 3
*/
/*
* Copyright (c) 2014, RoboPeak
* All rights reserved.
* RoboPeak.com
*
* Redistribution and use in source and binary forms, with or without modification,
* are permitted provided that the following conditions are met:
*
* 1. Redistributions of source code must retain the above copyright notice,
* this list of conditions and the following disclaimer.
*
* 2. Redistributions in binary form must reproduce the above copyright notice,
* this list of conditions and the following disclaimer in the documentation
* and/or other materials provided with the distribution.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" AND ANY
* EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES
* OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT
* SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
* SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT
* OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION)
* HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR
* TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*
LDrobot https://www.ldrobot.com/download/en/124
datasheet at
https://github.com/ldrobotSensorTeam/DeveloperKit/blob/master/D100Kit.md
D100 red wire to +5V
Yellow wire to GND
Green wire to RX1 D13 on Portenta
black wire strangely to D3 as it is the motor PWM control.
*/
// This sketch code is based on the RPLIDAR driver library provided by RoboPeak
#include <RPLidar.h>
// You need to create an driver instance
RPLidar lidar;
#define RPLIDAR_MOTOR D5 // The PWM pin for control the speed of RPLIDAR's motor.
// This pin should connected with the RPLIDAR's MOTOCTRL signal
#include <Adafruit_SSD1327.h>
// Used for software SPI
#define OLED_CLK D9
#define OLED_MOSI D8
// Used for software or hardware SPI
#define OLED_CS D7
#define OLED_DC D6
// Used for I2C or SPI
#define OLED_RESET -1
// software SPI
//Adafruit_SSD1305 display(128, 64, OLED_MOSI, OLED_CLK, OLED_DC, OLED_RESET, OLED_CS);
// hardware SPI
Adafruit_SSD1327 display(128, 128, &SPI, OLED_DC, OLED_RESET, OLED_CS);
// I2C
//Adafruit_SSD1327 display(128, 128, &Wire, OLED_RESET, 1000000);
unsigned long myDelay = 5000; // non-block delay in milliseconds
unsigned long myStart;
float myStoreAngle;
void setup() {
Serial.begin(115200);
myStart = millis(); // set delay
// bind the RPLIDAR driver to the arduino hardware serial1
lidar.begin(Serial1);
//while (! Serial) delay(100); // blocking, messes up beginners
// set pin modes
pinMode(RPLIDAR_MOTOR, OUTPUT);
//delay(10000); //to conect serial monitor
//Serial.println("SSD1327 OLED test");
if ( ! display.begin(0x3D) ) {
Serial.println("Unable to initialize OLED");
while (1) yield();
}
display.clearDisplay();
display.setTextSize(1);
display.setTextWrap(false);
display.setTextColor(SSD1327_WHITE);
display.setCursor(0,0);
display.display();
/*
Serial.println("Stopping Lidar");
analogWrite(RPLIDAR_MOTOR, 0); // 255 is max
delay(5000);
Serial.println("medium Lidar");
analogWrite(RPLIDAR_MOTOR, 125); // 255 is max
delay(5000);
Serial.println("fast Lidar");
analogWrite(RPLIDAR_MOTOR, 255); // 255 is max
*/
rplidar_response_device_health_t myLidarHealth; // _u8 status; _u16 error_code;
lidar.getHealth(myLidarHealth,2000);
//Serial.println(myLidarHealth);
rplidar_response_device_info_t myLidarInfo;
/*
_u8 model;
_u16 firmware_version;
_u8 hardware_version;
_u8 serialnum[16];
*/
lidar.getDeviceInfo(myLidarInfo, 2000);
}
void loop() {
if ( (millis() - myStart ) >= myDelay) {
myStart = millis(); // reset the delay time
display.clearDisplay();
display.setCursor(0, 0);
display.println("Rocksetta D100 Lidar");
}
if (IS_OK(lidar.waitPoint())) {
float distance = lidar.getCurrentPoint().distance; // distance value in mm unit
float angle = lidar.getCurrentPoint().angle; // angle value in degree
bool startBit = lidar.getCurrentPoint().startBit; // whether this point is belong to a new scan
byte quality = lidar.getCurrentPoint().quality; // quality of the current measurement
if (startBit) {
if (angle > 360 ) {angle = angle - 360;}
myStoreAngle = angle;
Serial.println("----------------------- starting angle: " + String(angle, 3) + " degrees -------------------------");
} else {
myStoreAngle = angle + myStoreAngle;
}
if (myStoreAngle > 360 ) {myStoreAngle = myStoreAngle - 360;}
if (angle > 360 ) {angle = angle - 360;}
Serial.print("d: " + String(distance, 3) + " mm, raw angle: " + String(angle, 3) + " degrees, angle: " + String(myStoreAngle, 3) + " degrees, quality: " + String(quality, 3) +" " );
byte myShow = quality;
/*
if (myShow > 255) {myShow = 255;}
if (myShow < 127) {myShow = 127;}
*/
// ignore3 the above
myShow = 255;
///if (quality < 55) {myShow = 127;} else {myShow = 255;}
//int myX = (int) (distance * cos(myStoreAngle * 3.1416 / 180.0));
//int myY = (int) (distance * sin(myStoreAngle * 3.1416 / 180.0));
// int myX = (int) (distance * cos(angle * 3.1416 / 180.0));
//int myY = (int) (distance * sin(angle * 3.1416 / 180.0));
// flip sin cos
int myX = (int) (distance * sin(angle * 3.1416 / 180.0));
int myY = (int) (distance * cos(angle * 3.1416 / 180.0));
//if (angle > 90 && angle < 180){ myX = -1 * myX; myY = -1 * myY; }
//if (angle > 270 && angle < 360){ myX = -1 * myX; myY = -1 * myY; }
/*
// flip all values
int myTemp;
//if (angle > 90 && angle < 360){
myTemp = myX;
myX = myY;
myY = myTemp;
//}
*/
// now check the sign of the values
// if (angle > 90 && angle <= 180){ myX = -1 * myX; myY = -1 * myY; }
// if (angle > 270 && angle <= 360){ myX = -1 * myX; myY = -1 * myY; }
int myX1Map = map((int)myX, 0, 500, 0, 127); // not sure what to map from possibly 8000 mm = 8 m
// if (myX1Map < -64){myX1Map = -64;}
int myY1Map = map((int)myY, 0, 500, 0, 127);
//if (myY1Map < -64){myY1Map = 0;}
int myMidX = 64;
int myMidY = 64;
Serial.print(" X: ");
Serial.print(myX1Map);
Serial.print(", y: ");
Serial.print(myY1Map);
Serial.println();
// for the OLED display
display.drawPixel(myX1Map + myMidX, myY1Map + myMidY, myShow);
display.display();
} else {
analogWrite(RPLIDAR_MOTOR, 0); //stop the rplidar motor
// try to detect RPLIDAR...
rplidar_response_device_info_t info;
if (IS_OK(lidar.getDeviceInfo(info, 100))) {
// detected...
lidar.startScan();
// start motor rotating at max allowed speed
analogWrite(RPLIDAR_MOTOR, 255); // 255 is max
delay(1000);
}
}
}