Hello!
I'm currently working on a new project, where I try to build a Quadpedal robot dog.
The 3D printed dog has 4 legs, each powered by a shoulder, elbow and wrist high volt servo.
That's 12 servos total. The servo's are rated rated for ~19kg at 6V and ~23kg at 8.4V.
After watching some videos where people test similair servo's, the current draw goes up to 5-7Amps!
I know that is the max. stall current, but if all 12 were to max out, I'd be looking at about 80Amps.
The only solution I can think of is using a LiPo battery, used in the RC world.
With a 2 cell 5000mAh pack and 20C rating I would have a continious current draw of 100Amps.
Which would give me a 20% buffer if all servo's max out.
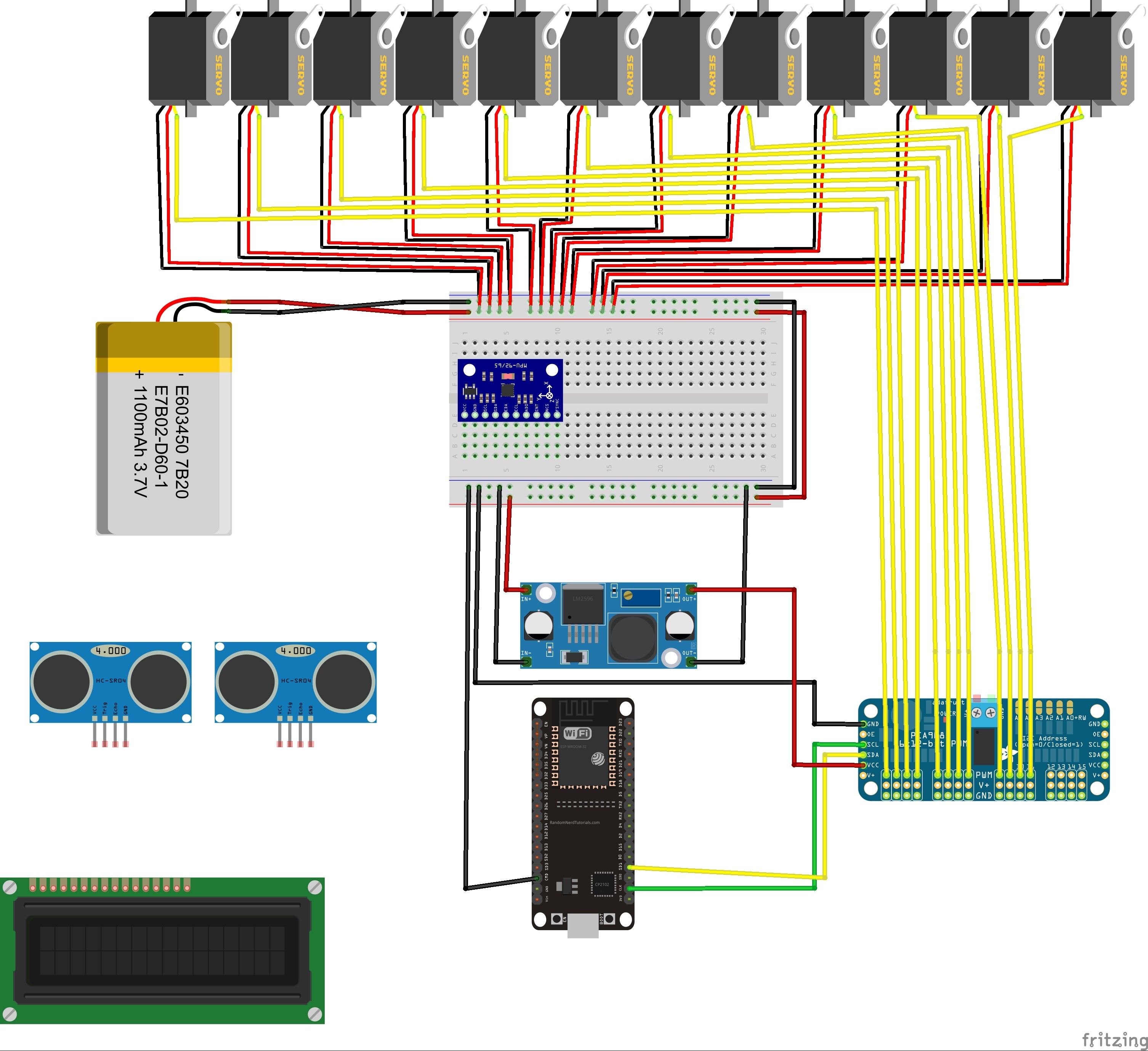
Attached is a schematic on how I think I should power the system, but I hear mixed stuff about LiPo's, their security etc.
So the questions I have:
- Would the system work like this?
- Is this system under/overkill?
- What kind of security features do I need to build in so the LiPo won't empty below a voltage treshhold?
Thanks!
The first thing you need to know is that Lipo specifications are often pretty unrealistic. More marketing than engineering. To be safe I'd look for at least 5000mAh 30C. There's a reasonable chance that will actually deliver the currents you need.
The next thing is that you cannot run those currents through a breadboard. Breadboards contacts are good for no more than about 0.5A. You need proper plugs and soldered joints.
Other than that it's difficult to comment since you haven't marked most the components shown in your Fritzy "diagram".
Steve
OPs fr*tz.
A 2cell 5000mAh battery is heavy.
You will have a momentary large draw on power up but LiPos are good at providing that.
You will have a few servos that are currently supporting the weight making a bigger draw and many other servos drawing almost nothing.
I think that 5000mAh is overkill. But batteries are cheap. Get different capacities so that if one is too little or another is too heavy, you can swap without waiting for delivery.
"The only solution I can think of is using a LiPo battery, used in the RC world.
With a 2 cell 5000mAh pack and 20C rating I would have a continious current draw of 100Amps.
Which would give me a 20% buffer if all servo's max out."
That seems a little optimistic. People have been building hexapods and quadrapods for decades, so there should be a lot of powering info available. Look at the current kits available and see what type of power setup they use. The 8.4v rating of the servos should allow you to use LiPo batteries efficiently in your project. Be aware of the output voltage of any battery pack you use that it is close to 8.4v output and not 5v.
First of all thanks for the replies!
slipstick:
The first thing you need to know is that Lipo specifications are often pretty unrealistic. More marketing than engineering. To be safe I'd look for at least 5000mAh 30C. There's a reasonable chance that will actually deliver the currents you need.
The LiPo I ordered wasn't available, so I took your advice and went a bit bigger on the C rating.
slipstick:
The next thing is that you cannot run those currents through a breadboard. Breadboards contacts are good for no more than about 0.5A. You need proper plugs and soldered joints.
Sorry that the schematic was rushed. Was to lazy... I'm not going to power the servo's through the breadboard.
vinceherman:
You will have a few servos that are currently supporting the weight making a bigger draw and many other servos drawing almost nothing.
I guess this is inevitable, I am trying to keep the weight low with the design, but there are always some servo's working hard. Hence why I want a sufficient power supply.
vinceherman:
I think that 5000mAh is overkill. But batteries are cheap. Get different capacities so that if one is too little or another is too heavy, you can swap without waiting for delivery.
Ordering a few is a good tip. But pure theoretical it isn't that much for the application right? With all servos working a bit, assume 3A per servo. Thats 12x3 = 36A. 5000mAh/36A = 0.14h which is about 8 minutes of run time? Not that overkill imo
assume 3A per servo
It depends on the servo chosen, which you forgot to state.
The general rule of thumb is 1A/moving servo, so 12A for a 12 servo quadruped in steady state motion.
However, the servo power supply must be able to provide the combined start/stall currents, which is much higher than that, for a short period of time.
jremington:
It depends on the servo chosen, which you forgot to state.
I'm using 12 "jx pdi-hv6223mg" servo's. Found a video about a similair motor pulling 6/7A under max load.
With the static weight of the legs body and battery I still think the servo's will use quite a bit of current.
For now I settled on a 2cell 6500mAh 70C LiPo, which might be overkill. But I rather test with lots of juice and weight and later scale down if it works.
One question I asked in the first post was about LiPo security, which nobody replied to yet.
Sucking a LiPo below 3V is concidered very bad for the LiPo. Can I use the Arduino to measure this?
And what about thermal protection? Running 90A's should turn anything hot.
The current levels you're quoting are stall currents which you will see only for a few milliseconds on startup and when you actually have the servo stalled. If your design is such that all 12 servos are stalled for any length of time then you need a different design. No servos will take being stalled for a long time. I would guess that your normal running current will be below half the maximum, probably well below.
Thermal protection is rarely a problem with Lipos except when they are being charged at ridiculously fast rates. You can measure the temp if you like. Arduinos are capable of that sort of thing.
OTOH overdischarge can be a problem, going below about 3V PER CELL can cause damage. I assume you intend to connect the battery to Vin so there's nothing stopping you from measuring the voltage with the Arduino. With a simple voltage divider you can measure the overall voltage and maybe give a warning if it falls below 6V.
Steve